

High-dynamic multi-target unmanned aerial vehicle detection method based on feature fusion
A feature fusion and detection method technology, applied in computer parts, instruments, calculations, etc., can solve problems such as false detection and easy loss of targets, and achieve the effects of strong universality, improved intelligence, and convenient simultaneous detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] In order to make the objectives, technical solutions and advantages of the embodiments of the present invention clearer, the following will be combined with the appendixes of the embodiments of the present invention. Figure 1-6 , to clearly and completely describe the technical solutions of the embodiments of the present invention. Obviously, the described embodiments are some, but not all, embodiments of the present invention. Based on the described embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art fall within the protection scope of the present invention.
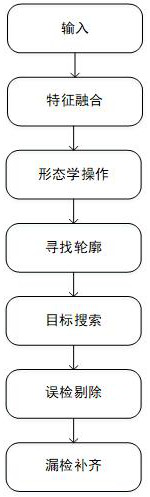
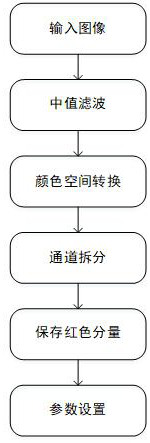
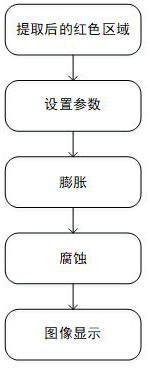
[0071] like Figure 1-6 As shown: this embodiment provides a high dynamic multi-target UAV detection method based on feature fusion, including the following steps:
[0072] Step 1: Real-time detection and acquisition of images;
[0073] Step 2: Feature extraction and feature fusion;
[0074] Step 3: Morphological operation;
[0075] Step 4: Find the tar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More