

Unmanned aerial vehicle autonomous landing method based on two-dimensional code recognition
A two-dimensional code, drone technology, applied in the direction of altitude or depth control, can solve problems such as unfavorable accurate positioning and landing, high price, difficult to popularize, etc., to achieve a wide range of applications, strong damage resistance, and efficient landing. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
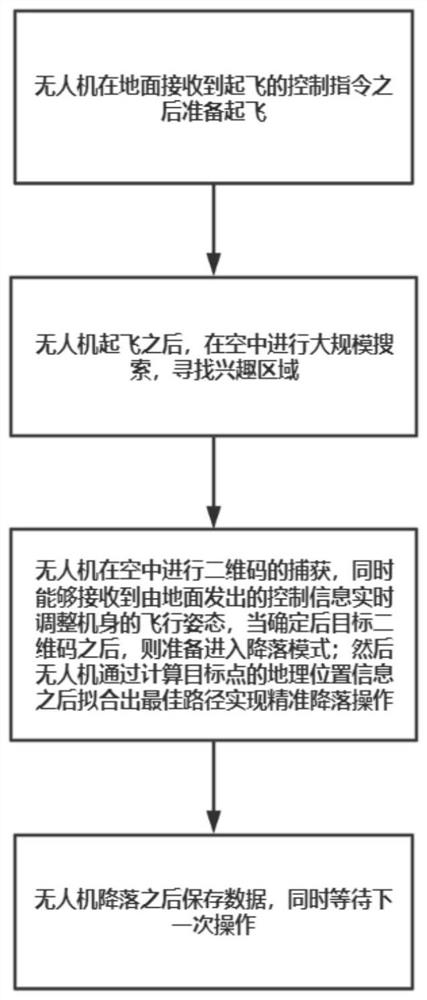
[0027] see figure 1 , the present invention also provides a method for identifying the autonomous landing of a quadrotor UAV based on a two-dimensional code, and the process of using the UAV to identify the two-dimensional code to control its precise landing, including the following operation steps:
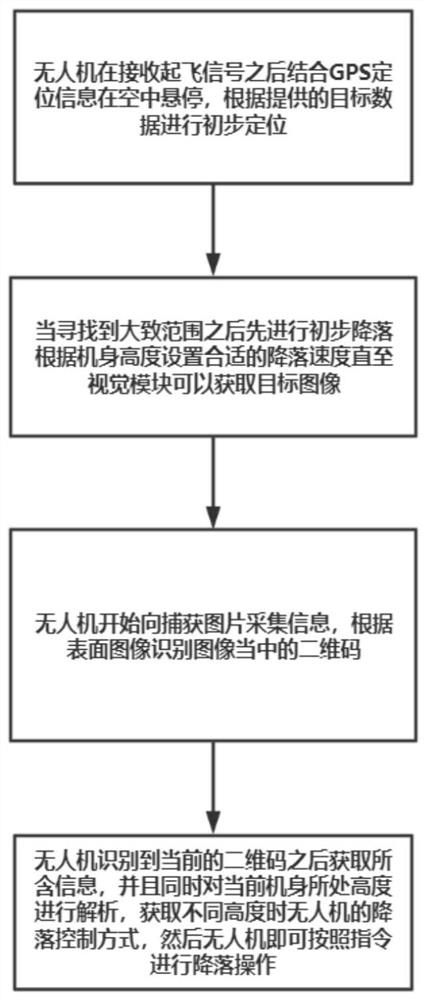
[0028] Step 1, the UAV receives the initial identification by the GPS positioning system and performs a hierarchical landing according to the UAV flight height;
[0029] Step 2, when the drone landed to a certain height, the target QR code can be searched to divide the area of interest;
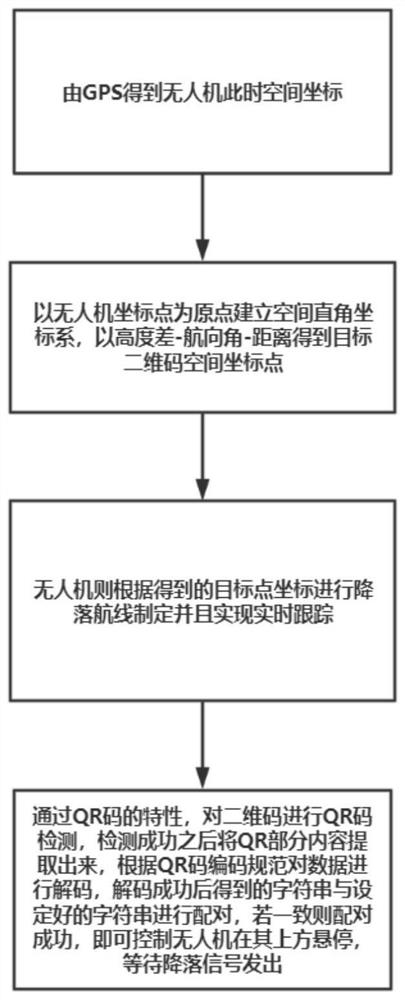
[0030] Step 3, in the area of interest, the visual module performs image matching, and after the matching is successful, the spatial position of the two-dimensional code is positioned with the position of the drone as the origin to establish a spatial coordinate system;
[0031] Step 4: Receive the positioning coordinate information sent by the vision module and the altitude information sen...
Embodiment approach
[0044] Preferably, as an implementable embodiment: controlling the drone to hover at a certain height and enter the landing mode specifically includes the following operation steps:
[0045] Control the drone to continuously descend above the QR code position and feed back the altitude information in real time.
[0046] Landing is performed when the received altitude position information matches the landing mode.
[0047]The method for identifying the autonomous landing of a quadrotor UAV based on the two-dimensional code provided by the embodiment of the present invention utilizes the characteristics of the two-dimensional code to solve the problem that the destination cannot be correctly determined when there are multiple landmarks, and the method can also be used in other solutions. Among them, it is not only used for positioning but also used for real-time tracking. The use of two-dimensional codes is not only reliable, but also low in cost, easy to design, and highly acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More