

Mechanical arm six-degree-of-freedom visual closed-loop grabbing method based on TSDF three-dimensional reconstruction
A technology of 3D reconstruction and manipulators, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unpromotable application scenarios and low success rate, and achieve time-consuming calculations, enhanced generalization, and high grasping The effect on success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0071] The present invention will be further described below in conjunction with the accompanying drawings.
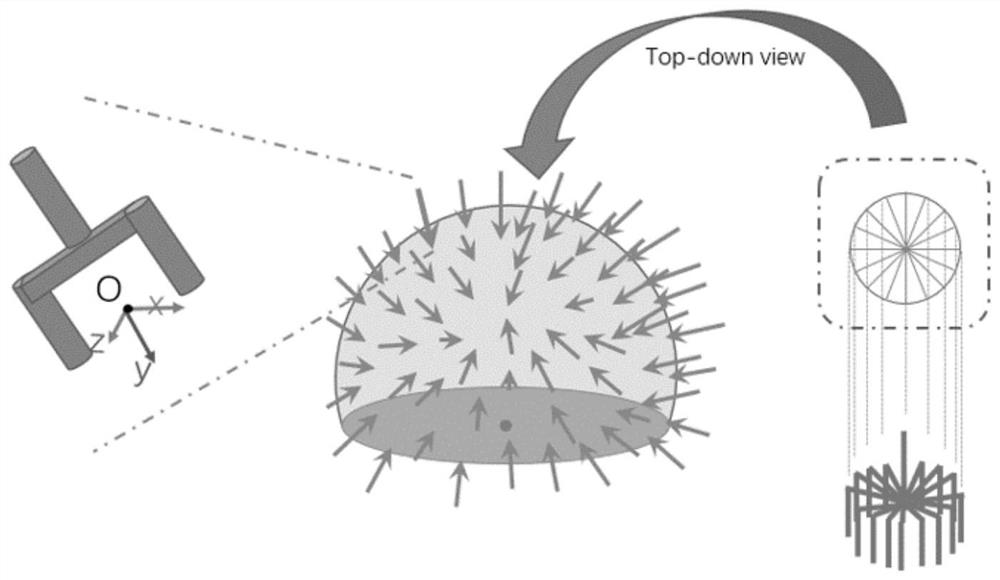
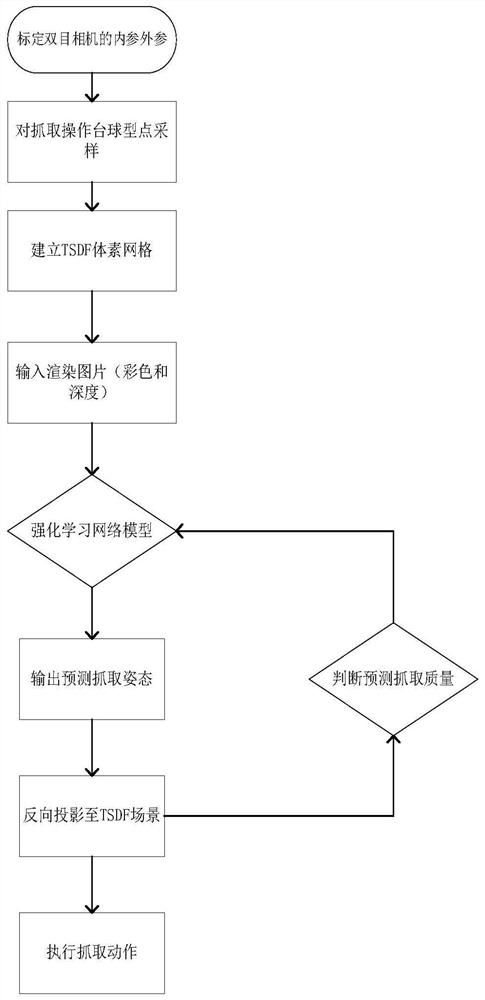
[0072] The six-degree-of-freedom visual closed-loop grasping method of a robotic arm based on TSDF three-dimensional reconstruction of the present invention, an example of physical grasping is shown in the attachment Image 6 , the specific process is as follows:
[0073] Step 1: The camera calibration method of Zhang Zhengyou and the ArUco Markers calibration method are used to calibrate the coordinate system of the robot arm base and the camera coordinate system:
[0074] First, the Intel D415 depth camera is vertically fixed to the end of the robotic arm, so that the camera and the end effector jaws are in a fixed attitude transformation, so that the binocular camera can capture the image information of the object on the grasping table. Then, Zhang Zhengyou's camera calibration method and ArUco Markers calibration method calibrate the camera's internal and external...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More