

Maneuvering target tracking method and device and computer readable storage medium
A technology of maneuvering target tracking and covariance, applied in the field of target tracking, can solve the problems of poor maneuvering target tracking effect and stability, and achieve good target tracking effect, strong stability, and good estimation performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
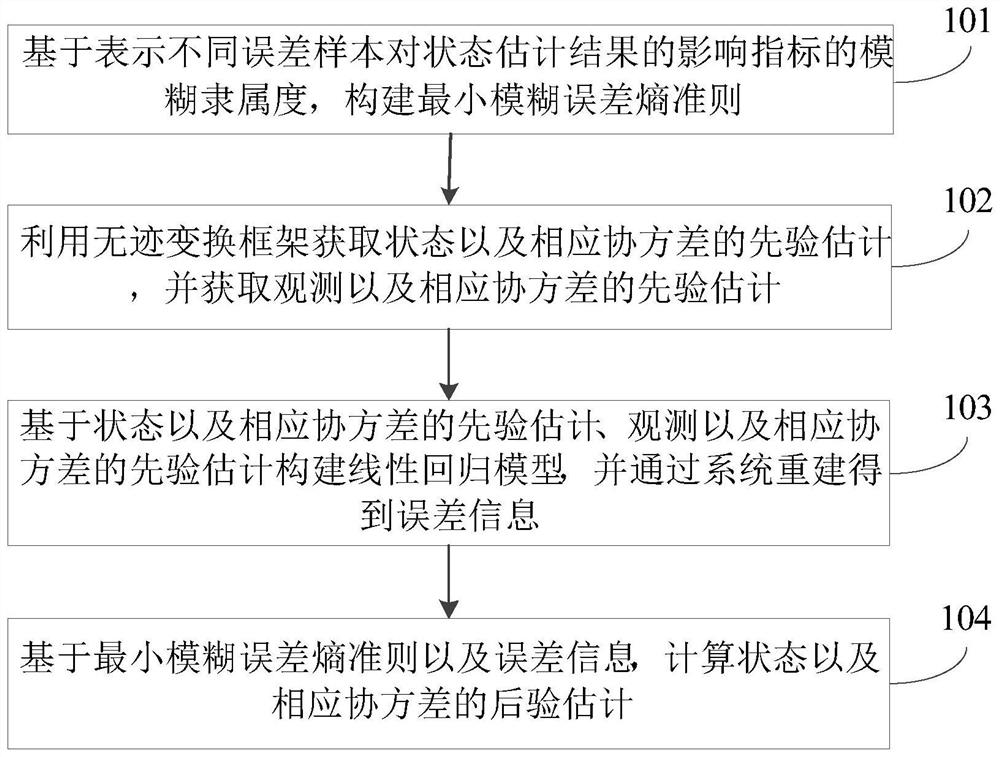
[0030] In order to solve the problem of poor maneuvering target tracking effect and stability of the filtering algorithm provided in the related art, the present embodiment proposes a maneuvering target tracking method, such as: figure 1 Shown is a schematic flowchart of the maneuvering target tracking method provided by the present embodiment, and the maneuvering target tracking method proposed by the present embodiment includes the following steps:
[0031] Step 101: Based on the fuzzy membership degrees of indicators representing the influence of different error samples on the state estimation result, construct a minimum fuzzy error entropy criterion.
[0032] Rayleigh entropy is derived from information theory learning and is usually used to measure the difference, randomness and uncertainty of random variables. For error e=X-Y, X, Y are continuous random variables, the error entropy can be measured by Rayleigh entropy as follows:
[0033]
[0034] Among them, α repres...
no. 2 example
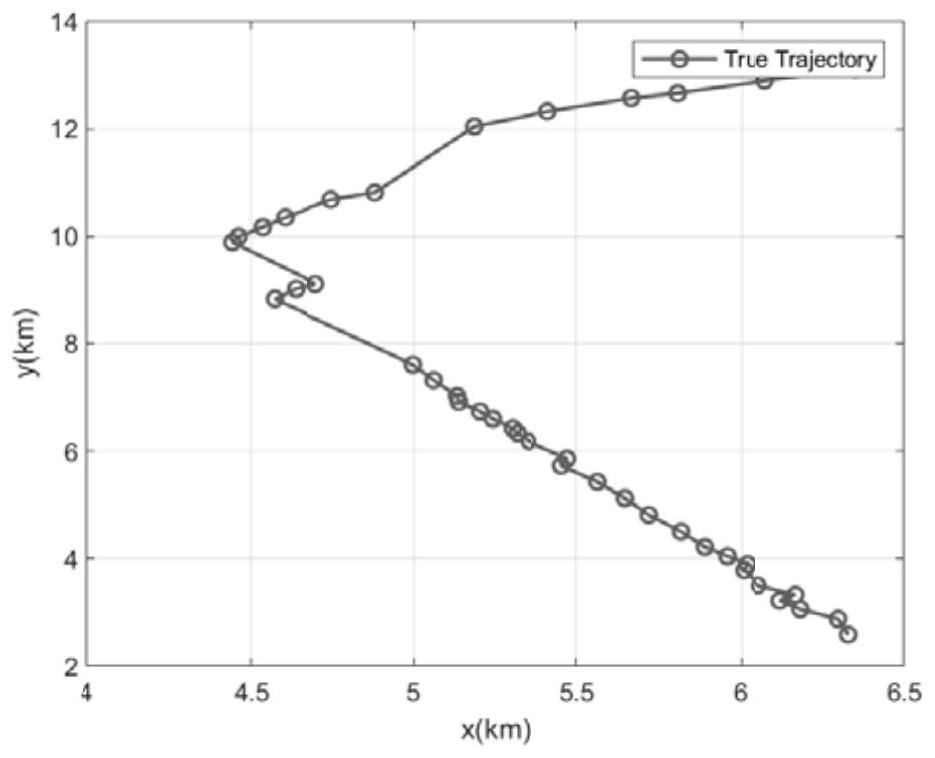
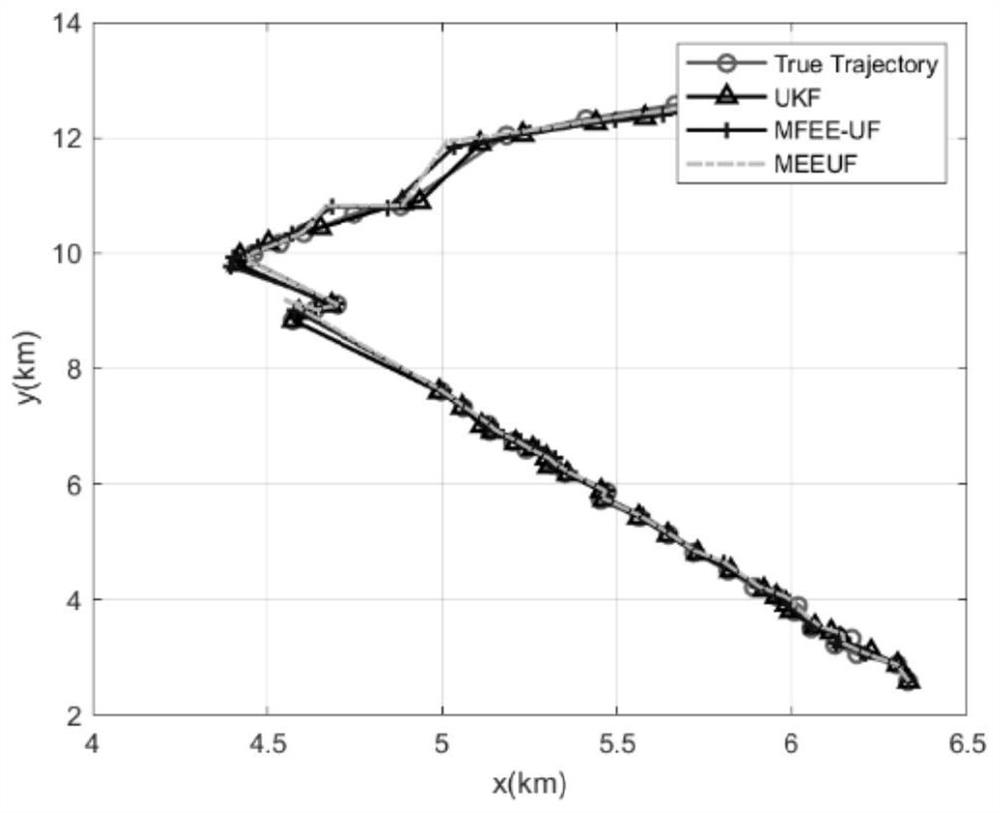
[0137] In order to further illustrate the technical effect of the maneuvering target tracking method provided by the embodiment of the present invention, in the following three experiments in this embodiment, the square root error (Root Mean Square Error, RMSE) will be used as the performance index of the filter, which is defined as follows :
[0138]
[0139] Among them, M is the number of Monte Carlo runs, and K is the number of sampling points.
[0140] The parameter settings are as follows:
[0141] The setting of the core width σ will have a significant impact on the performance of MFEE-UF. If the core width is too small, the robustness will be improved, and the convergence speed will be too slow, time-consuming, and there is a risk of falling into a divergent state; if the core width is too large, the convergence speed will be accelerated. At the same time, the performance will be weakened; in addition, considering the complexity and randomness of noise, the (e j -e...
no. 3 example
[0183] In order to solve the problem of poor maneuvering target tracking effect and stability of the filtering algorithm provided in the related art, the present embodiment shows a maneuvering target tracking device. For details, please refer to. Figure 5 , the mobile target tracking device of this embodiment includes:
[0184] A construction module 501 is used to construct the minimum fuzzy error entropy criterion based on the fuzzy membership degree representing the influence index of different error samples on the state estimation result;
[0185] Obtaining module 502 is used to obtain a priori estimation of state and corresponding covariance by utilizing the unscented transformation framework, and obtains a priori estimation of observation and corresponding covariance;
[0186] The reconstruction module 503 is used to construct a linear regression model based on a priori estimation of state and corresponding covariance, observation and a priori estimation of corresponding...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More