

Cleaning robot, photovoltaic tracking system and interactive cooperation method
A cleaning robot and tracking system technology, applied in the field of cleaning robots, can solve problems such as inability to clean, and achieve the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
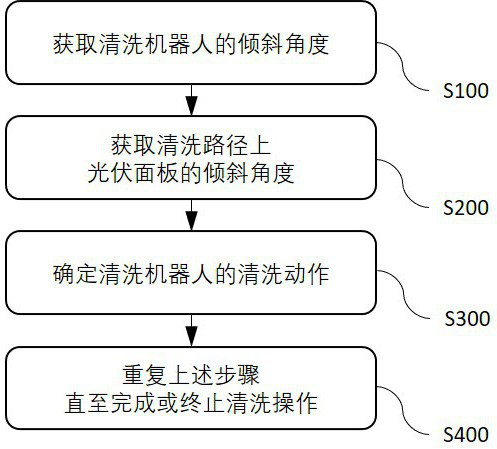
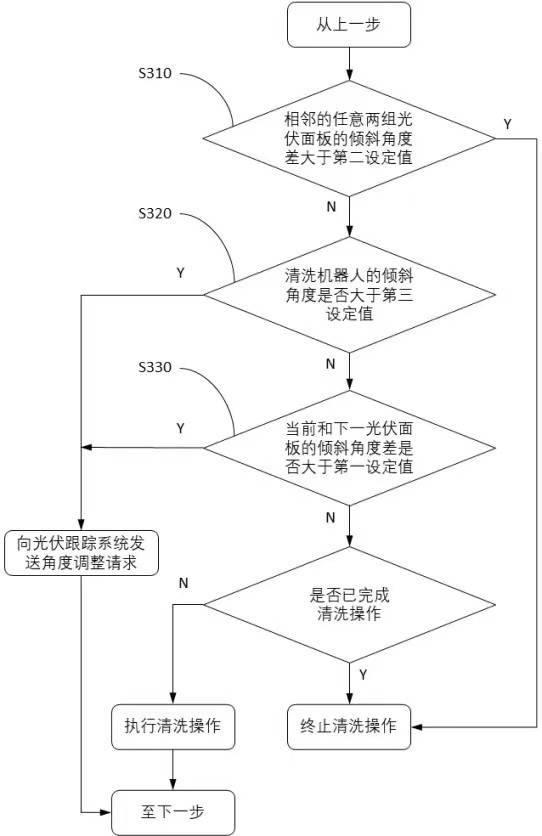
[0044] Example 1. The cleaning robot provided by the present application is used to automatically clean the photovoltaic panels of a plurality of photovoltaic tracking systems. This embodiment includes: a cleaning device for cleaning the photovoltaic panels; a walking device for walking along a set cleaning path; an inclination angle measuring device , used to measure the inclination angle of the cleaning robot; the first communication device is used to communicate with the photovoltaic tracking system and obtain the inclination angle of at least part of the photovoltaic tracking system on the cleaning path; the control device is used to determine the inclination angle of the cleaning robot and the above-mentioned Check whether the tilt angle of some photovoltaic tracking systems meets the cleaning conditions, and control the walking device and the cleaning device to perform cleaning operations when the cleaning conditions are met.
[0045] The specific structures of the clean...
Embodiment 2
[0048] Example two. As a variation of the first embodiment, the inclination angle measuring device of the cleaning robot may not be provided, for example, when a cleaning robot that can perform cleaning at any angle is used. At this time, the cleaning robot only needs to judge whether the cleaning conditions are met by the tilt angle of the photovoltaic tracking system on the cleaning path.
Embodiment 3
[0049] Example three. On the basis of the first embodiment, the tilt angle measurement device specifically includes an inertial acceleration sensor or a gyroscope or a combination thereof. The inertial acceleration sensor is usually composed of an inertial mass and an elastic element. When there is an inclined angle between the inertial acceleration sensor and the horizontal plane, the gravity of the inertial mass will deform the elastic element, and the above deformation is directly related to the inclination angle. Therefore, the inertial acceleration sensor It can be used to measure the tilt angle of the cleaning robot. Inertial navigation sensors on the market usually include multi-axis accelerometers with orthogonal settings, and some high-precision products also include sensing units such as single-axis or multi-axis gyroscopes, single-axis or multi-axis magnetometers. By filtering the measurement data of these sensing units and performing fusion calculation on multiple...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More