

Self-propelled cucumber harvesting robot
A self-propelled, robotic technology, applied in harvesters, manipulators, agricultural machinery and implements, etc., can solve the problems of inability to adjust harvesting cucumbers, easy to cut cucumber vines by mistake, low harvesting efficiency, etc., and achieve simple structure and good adaptability. , the effect of high harvesting efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings:
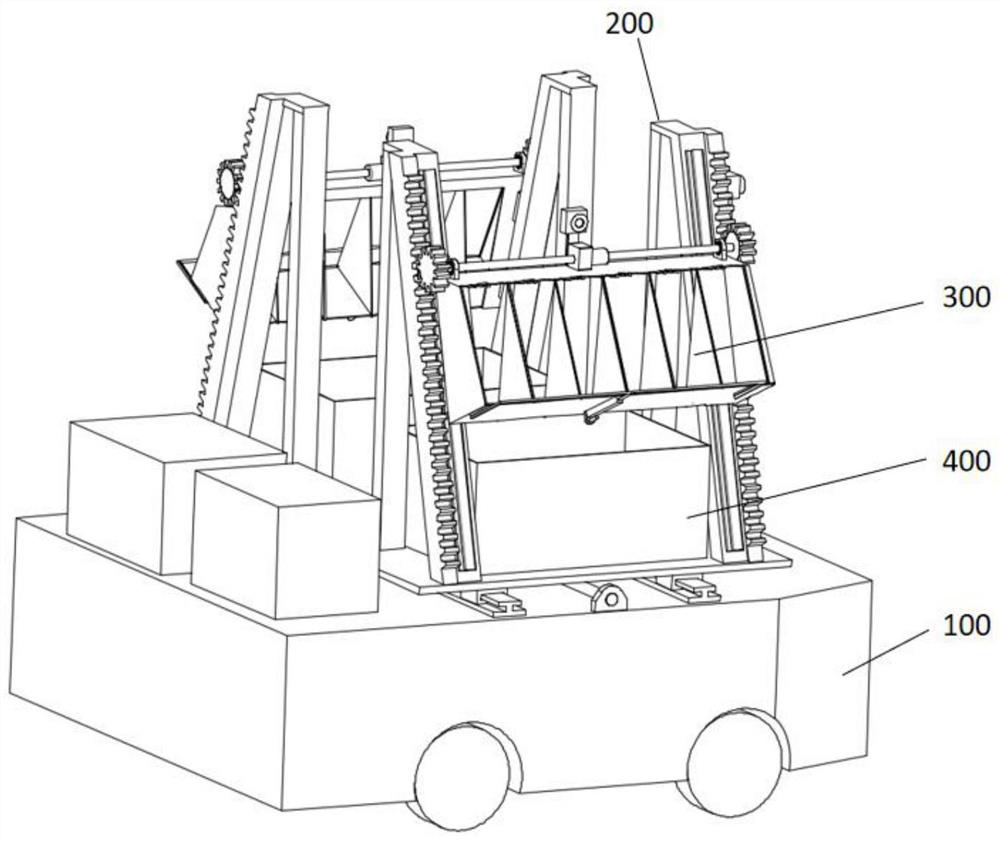
[0032] like figure 1 As shown, a self-propelled cucumber harvesting robot is composed of a mobile platform 100, a support module 200, a harvesting module 300 and a collection box 400; The number is two, which are symmetrically arranged on the upper side of the mobile platform 100 .
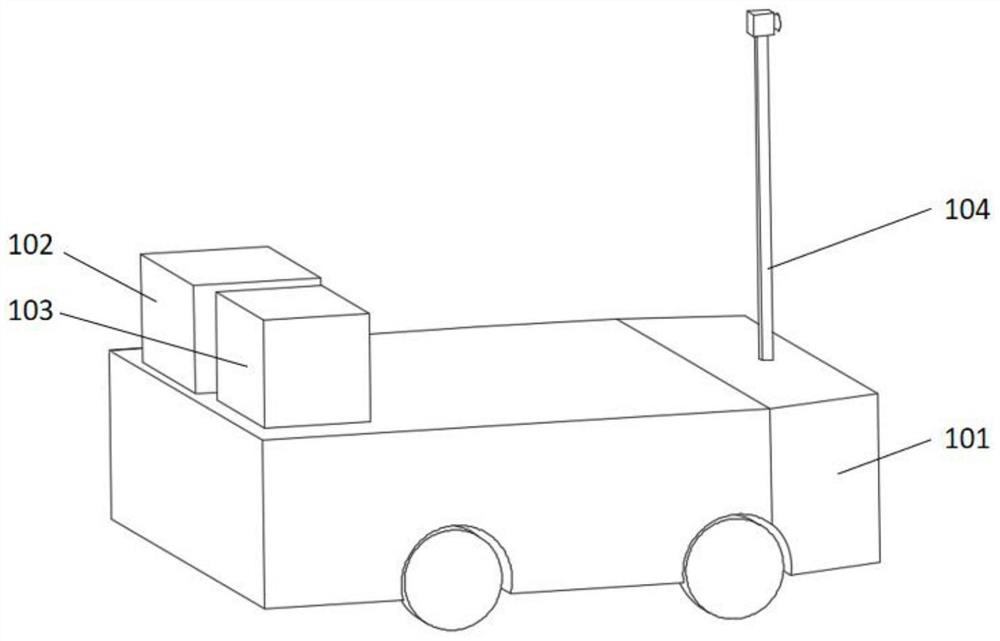
[0033] like figure 2 As shown, a self-propelled cucumber harvesting robot, the walking platform 100 is composed of a trolley 101, a battery box 102, a control box 103 and a first camera 104; the battery box 102 is fixed above the rear end of the trolley 101 by bolts, and the control box 103 passes through The bolts are fixed above the rear end of the trolley 101 and located on the right side of the battery box 102 , and the first camera 104 is fixed at the middle position above the front end of the trolley 101 by bolts.
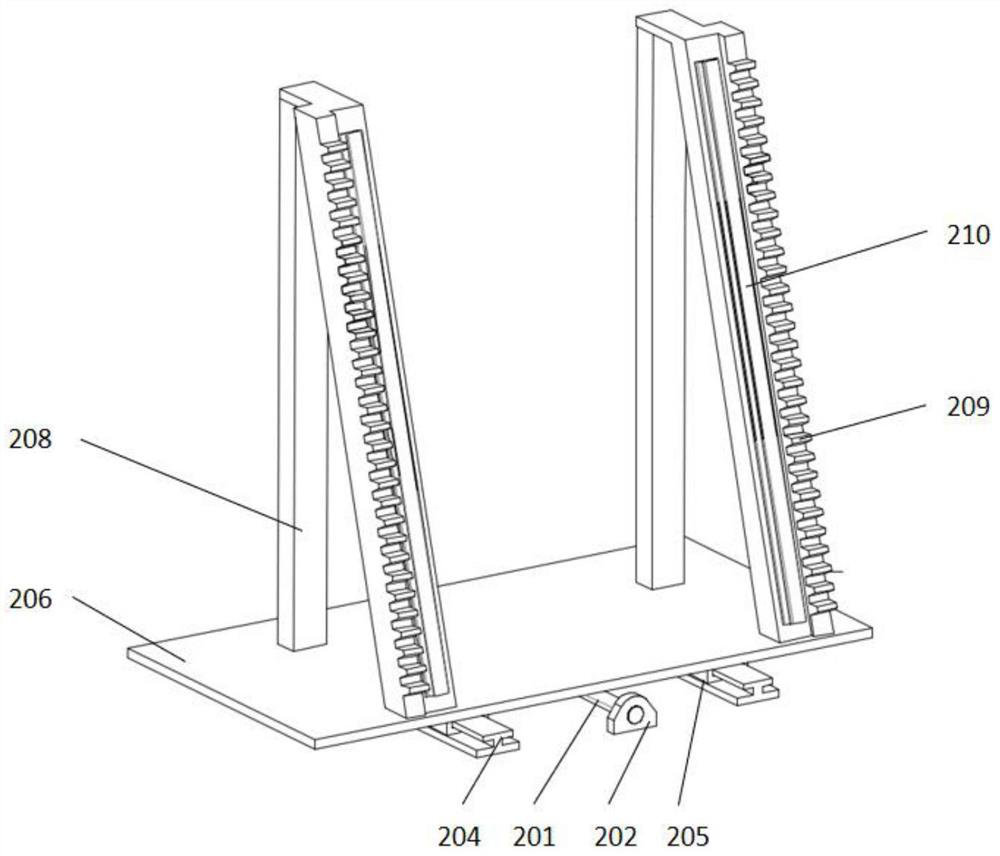
[0034] like Figure 3-4As shown, a self-propelled cucumber harv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More