

Pickup camera self calibration method based on robot motion
A technology of robot motion and camera, applied in the direction of manipulator, manufacturing tool, etc., can solve the problem of limitation and strictness of camera motion
Inactive Publication Date: 2007-01-03
INST OF AUTOMATION CHINESE ACAD OF SCI
View PDF2 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0003] The defect of the current camera self-calibration technology is that the restrictions on camera movement are relatively strict
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples


Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0035] The camera calibrated in Example 1 has been applied to the seam tracking of the arc welding robot. The camera calibrated in Example 2 has been applied to the positioning and navigation of mobile robots.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
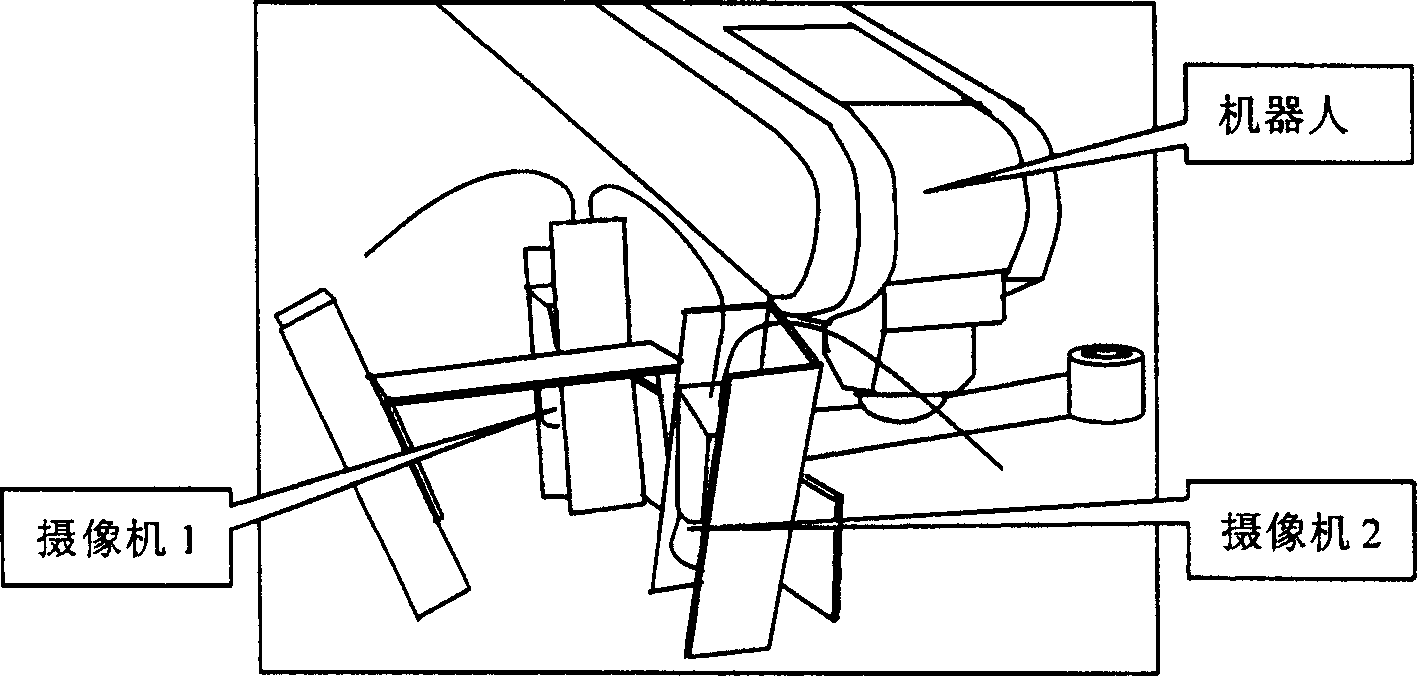
A self-calibrating method based on the movement of robot for the camera installed to terminal end of robot includes choosing a point ni the visual field of camera as a characteristic origin point, arbitrarily moving the terminal end of robot several times without changing its posture to obtain more characteristic origin points, using the least square method to obtain the internal and external parameters of camera, changing its postures, obtaining several space straight line from the center of optical axis and the imaging dots on image plane, using their intersection point to calibrate the position of characteristic point in basic coordinate system, and calculating the external parameter of terminal end.
Description
technical field [0001] The invention relates to a camera calibration technology in the field of robot vision control, in particular to a method for obtaining internal and external parameters of a camera. Background technique [0002] Traditionally, the calibration reference object-target is used to calibrate the camera. Specifically, a calibration reference object of known shape and size is placed in front of the camera, and the internal and external parameters of the camera are calculated by measuring the imaging position of the reference object on the image plane. . In practical applications, it is not allowed to place a specific calibration reference object in the environment in many cases. Therefore, the camera calibration technology (ie, self-calibration technology) that does not require a specific calibration reference object has received more and more attention. This technology is used in robots. It has broad application prospects in hand-eye system and head-hand sys...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B25J13/08
Inventor徐德谭民
OwnerINST OF AUTOMATION CHINESE ACAD OF SCI