

Robot with learning control function and method for controlling the robot
A technology of learning control and robotics, applied in the field of robotics, can solve problems such as sensor interference, frequent sensor maintenance, and inability to track high-frequency deviations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Hereinafter, preferred embodiments of the robot of the present invention will be described in detail with reference to the accompanying drawings.
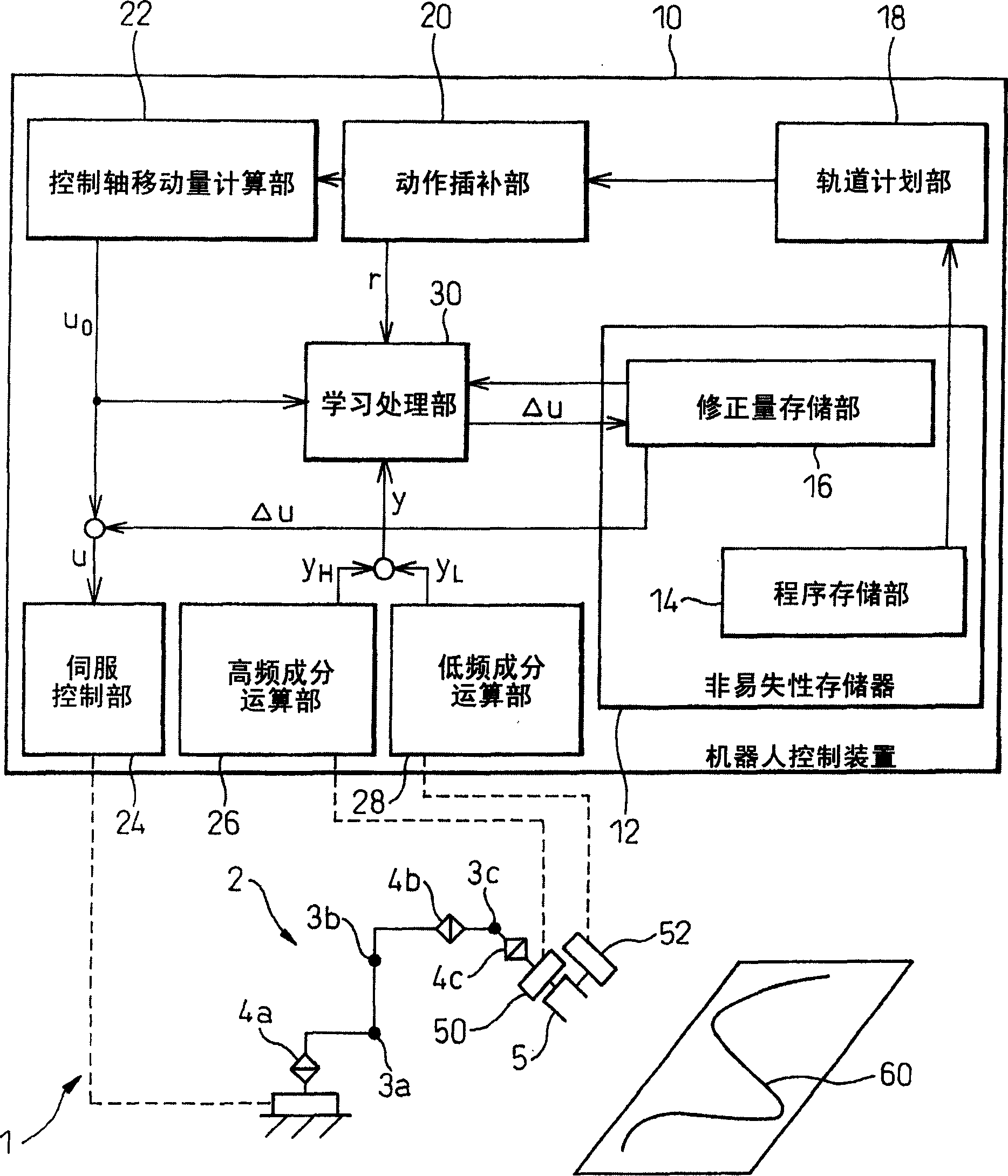
[0019] figure 1 The schematic configuration of the robot 1 of the present invention and the block configuration of the control device 10 included in the robot 1 are shown. In addition, in the present embodiment, the learning control unit is composed of a learning processing unit and a servo control unit described later, and the actual operation control unit is composed of a servo control unit.
[0020] Robot 1 is preferably multi-joint robot, and this robot mechanism part 2 has: three rotatable joints 3a, 3b and 3c; Three rotatable joints 4a, 4b and 4c, and at the end of robot mechanism part 2 An end effector 5 is installed on the joint 4c) in the illustrated example. And on the end effector 5, a movement information measuring part, that is, an acceleration sensor 50, is used to detect the acceleration of the translation d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More