

Mixed calibration method for Inertial measurement unit capable of eliminating gyro constant drift
An inertial measurement unit and calibration method technology, which is applied in the direction of speed measurement, measurement device, gyroscope/steering sensing device, etc. due to gyro effect, can solve the problems of inability to complete accurate IMU calibration, inconsistent calibration results, inconsistent error coefficients, etc. Solve the problem of inconsistent calibration results, the method is simple and easy to implement, and the effect of accurate calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
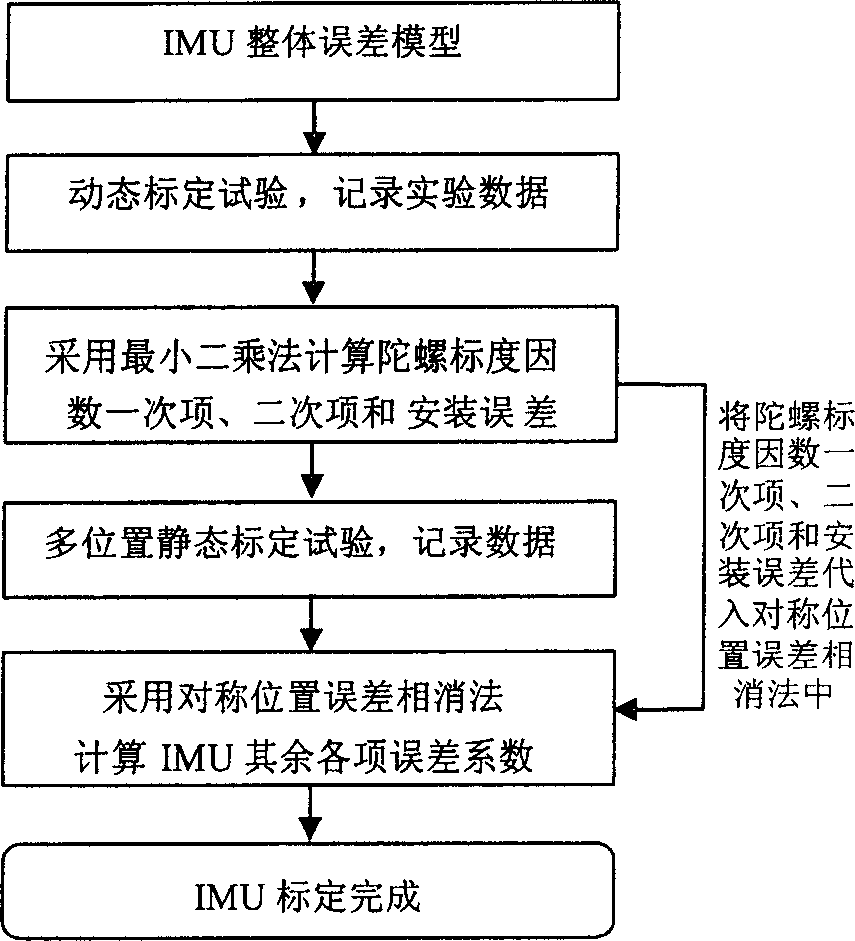
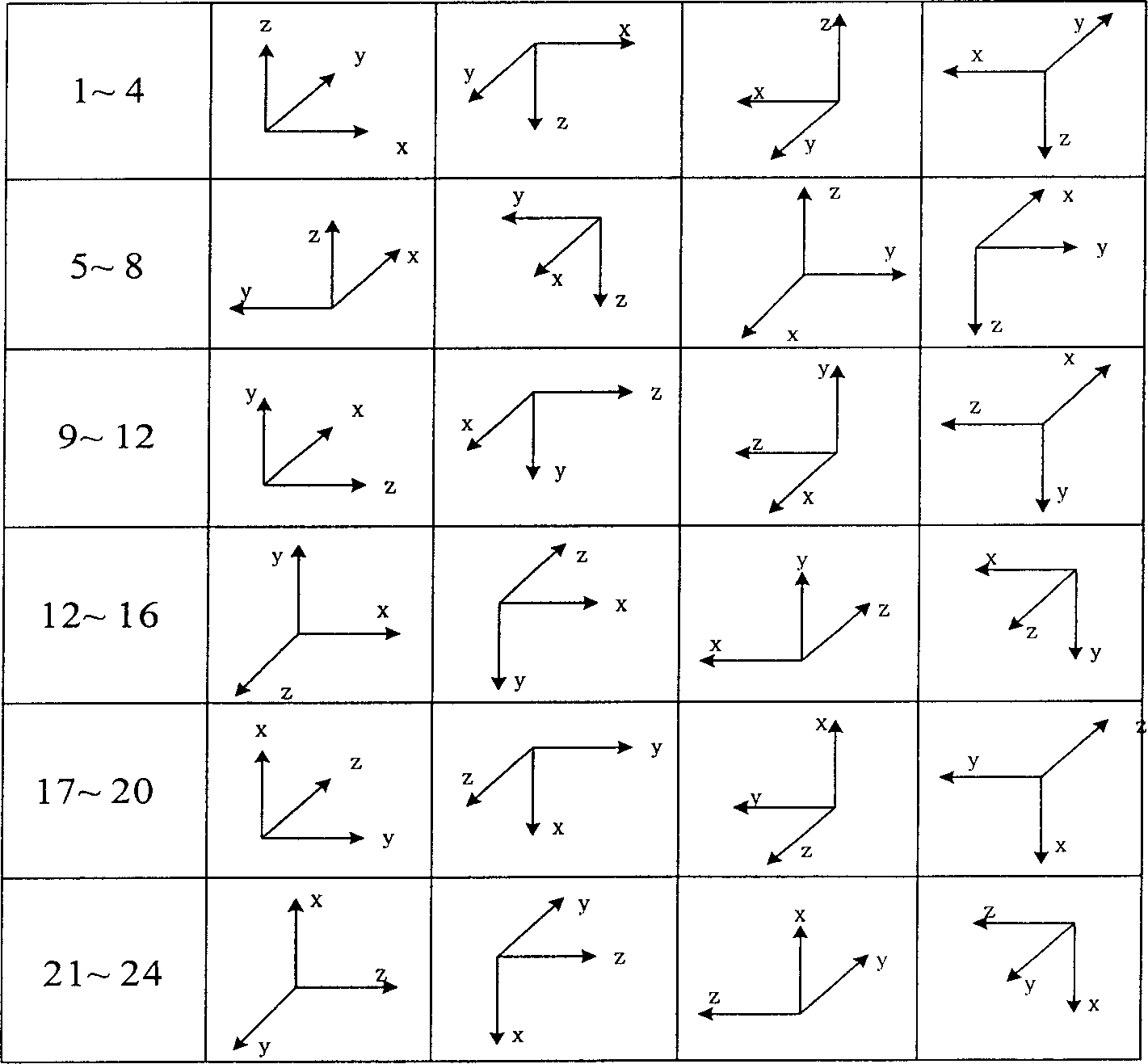
[0014] Such as figure 1 , 2 Shown, concrete method of the present invention is as follows:
[0015] 1. Establish the overall error model of the IMU, including the angular velocity channel error model and the acceleration channel error model of the IMU, as shown in formulas (1)-(3) and formulas (4)-(6) respectively.
[0016] Angular velocity channel error model:
[0017] ω ‾ x = K x 1 ω x + K x 2 ω x 2 + M xy ω y + M xz ω z + D x + D xx ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More