

System and method of gymnastic robot
A robot system and robot technology, applied in the directions of manipulators, toys, automatic toys, etc., can solve the problems of increasing the difficulty of motion control, increasing the load, and destroying the symmetry of the system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
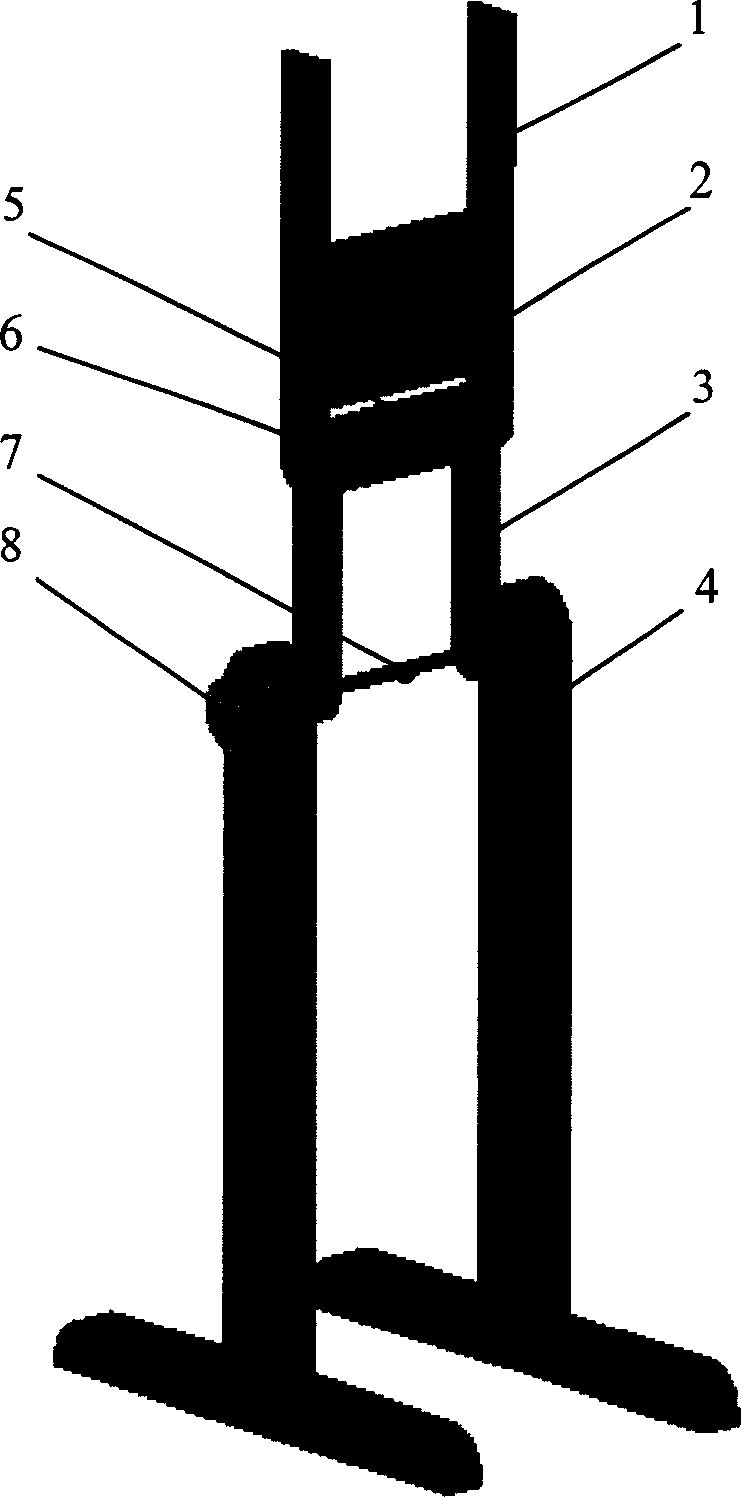
[0017] figure 1 , the gymnastics robot consists of a leg 1, a torso 2, an arm 3, a bracket 4, a motor 5, a shoulder angle sensor 6, a horizontal bar 7, and a wrist angle sensor 8.
[0018] The motor, shoulder angle sensor, arm and horizontal bar are fixed together, which is equivalent to the first link in the topology. One end (horizontal bar) of the first connecting rod is provided with a rotating bearing between the support, so that the first connecting rod can freely rotate around the axis of the horizontal bar. The wrist angle sensor is connected with the horizontal bar and installed on the support mechanism to measure the angle of rotation of the wrist, and the angular velocity can be calculated through the time differential of the angle.
[0019] The legs are fixed to the torso with no relative motion between them, acting as the second link in the topology. A rotating bearing is installed between the other end of the first connecting rod (the output shaft of the motor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More