

Networked robot control system based on CPUs
A control system and robot technology, applied in manipulators, manufacturing tools, etc., can solve problems such as function and performance limitations, achieve function and performance improvement, function and performance improvement, and realize the effect of secondary switching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
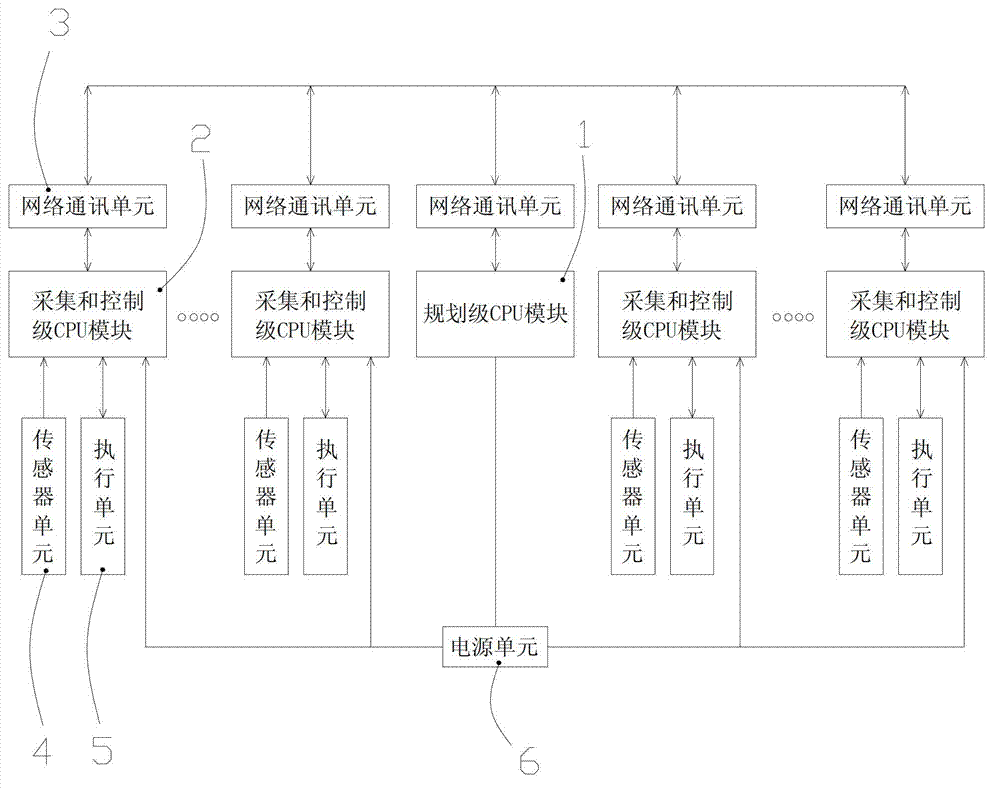
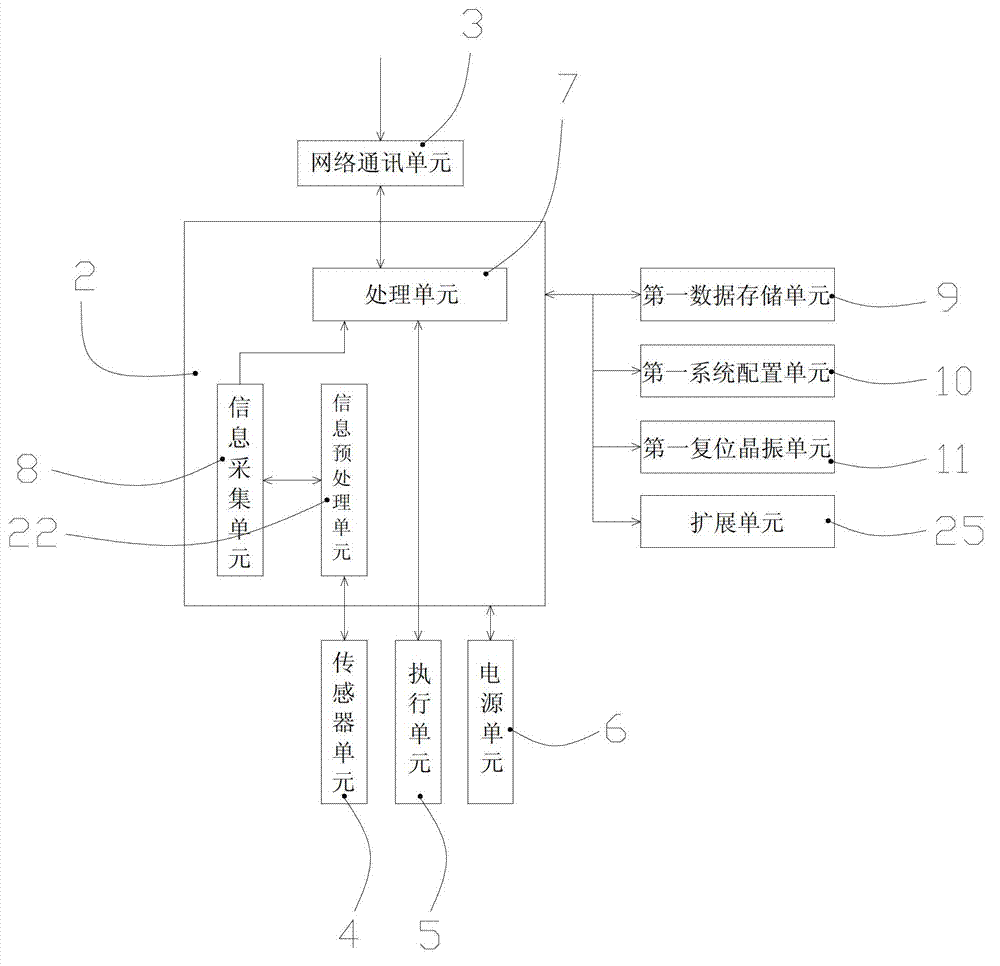
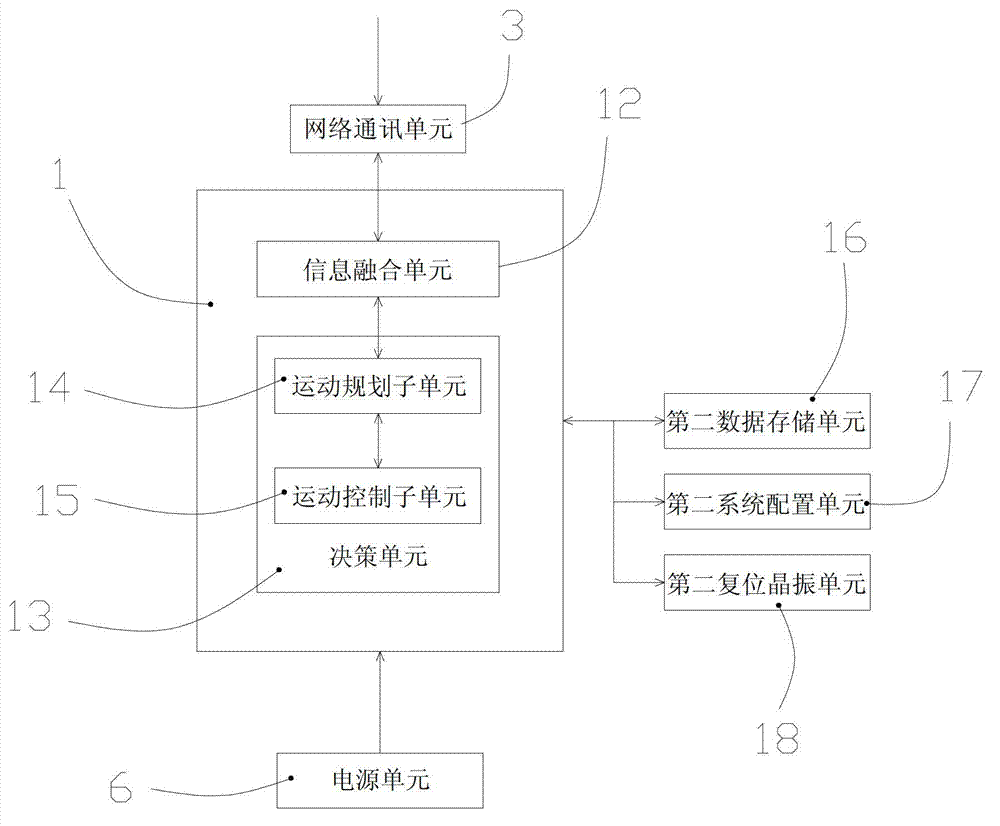
[0028] A networked robot control system based on multi-CPU, such as figure 1 As shown, it includes a planning-level CPU module 1 and multiple acquisition and control-level CPU modules 2. The acquisition and control-level CPU modules and the planning-level CPU modules are all connected to a network communication unit 3. Each acquisition and control-level CPU module The connected network communication units are respectively connected to the network communication units connected to the planning-level CPU module through the network. These acquisition and control level CPU modules are CPU modules that process different objects such as images, audio, etc., and the acquisition and control level CPU modules described in this embodiment are divided into four, which are respectively image CPU modules, audio CPU module, motion CPU module and network CPU module. Be connected with sensor unit 4 on each acquisition and control level CPU module, these sensor units are respectively the senso...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More