

Detection method of natural target in robot vision navigation
A technology of robot vision and target detection, which is applied in the field of natural target detection of robot visual navigation, can solve the problems that it is difficult to describe and distinguish different targets, and it is difficult to achieve natural target detection of robot visual navigation, so as to achieve fast calculation speed, good practical value, The effect of improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Specific implementation plan
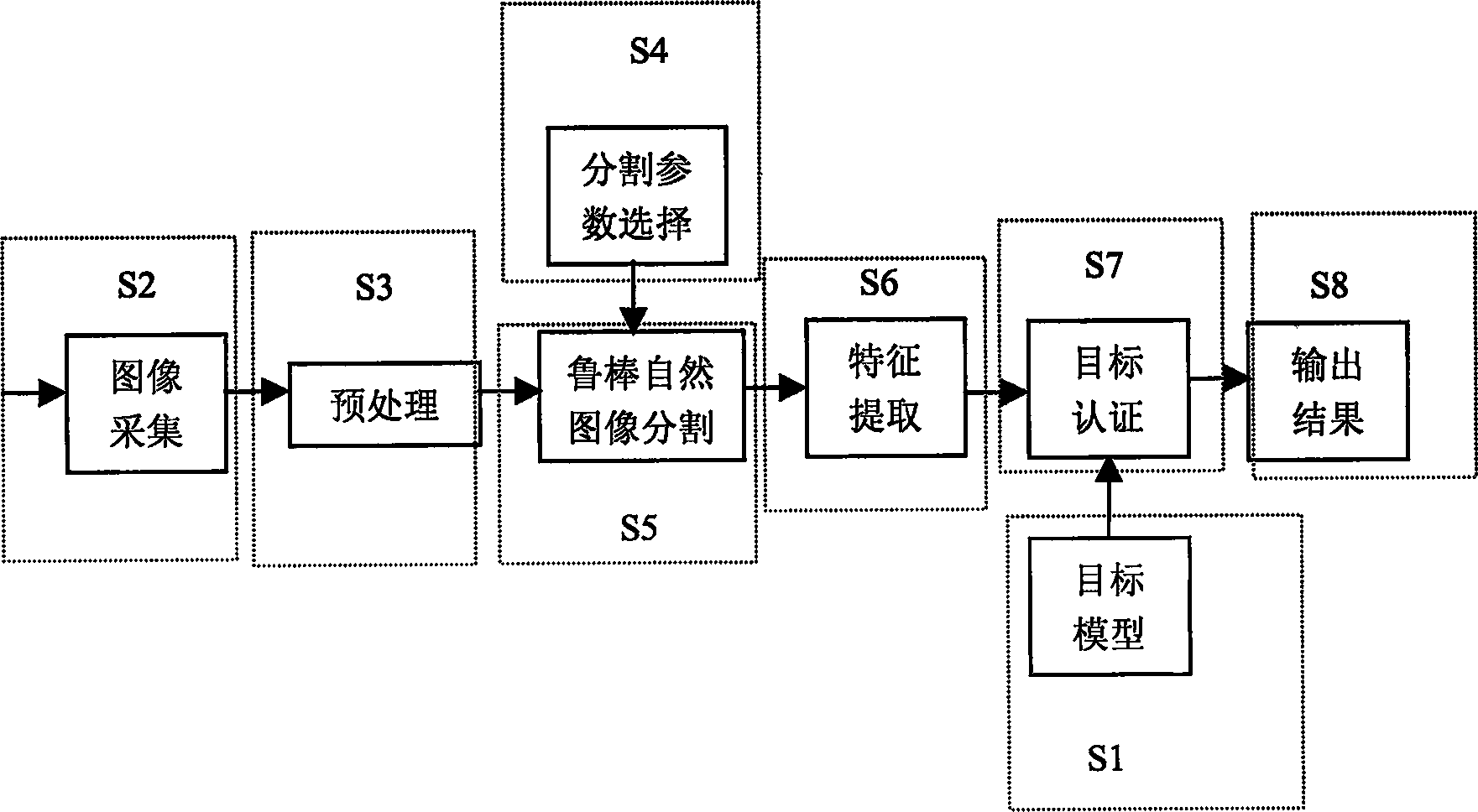
[0034] The block diagram of the natural target detection method in the robot visual navigation is as follows figure 1 Shown. The target detection process consists of eight steps: target modeling, image acquisition, preprocessing, segmentation parameter selection, natural image segmentation, feature extraction, target authentication, and output results.
[0035] First, establish the target model. The target model adopts statistical modeling. The color models of the target to be detected and the interference target are described by three color components of Cb, Cr and R / G, and the three-dimensional color components are projected to Cb-Cr and Cb-R / G respectively. On the plane, the target color template plane is formed. Through offline learning of a large number of target samples, the samples are mapped to the target color template plane, and the color templates of the target to be detected and the interference target are obtained by statistics. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More