

Running plan creating apparatus
a running plan and creating apparatus technology, applied in the direction of vehicle position/course/altitude control, process and machine control, instruments, etc., can solve the problems of not always high safety on the running track, failure to calculate the respective risk of the other vehicles, etc., to reduce potential risks, reduce potential risks, and degree of risk
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
first embodiment
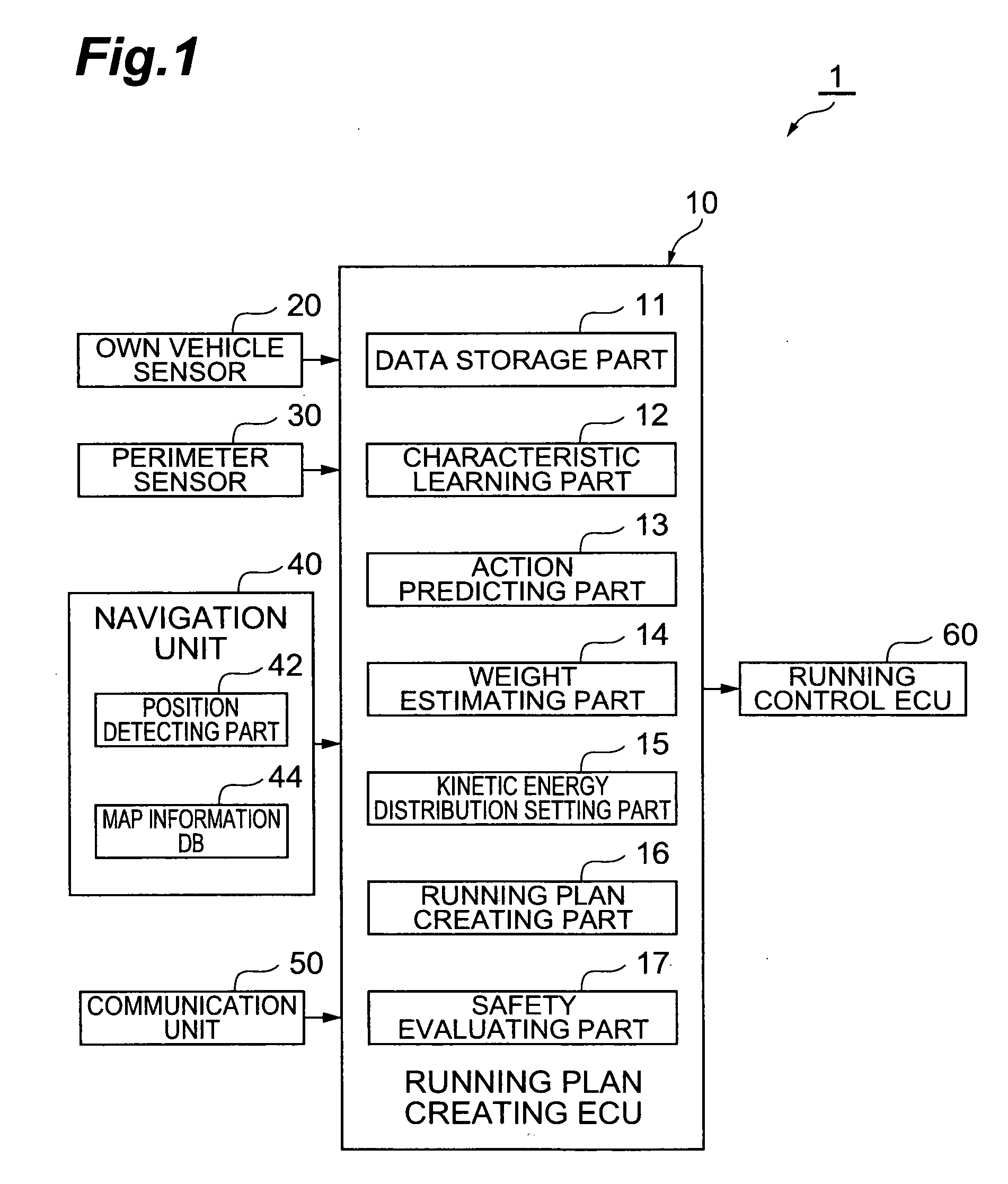
[0028]FIG. 1 is a block diagram showing the structure of the running plan creating apparatus in accordance with the first embodiment. As shown in FIG. 1, the running plan creating apparatus 1 comprises a running plan creating ECU (Electric Control Unit) 10 constructed by utilizing hardware such as a CPU (central processing unit), a memory, and the like and software, while being mounted to a vehicle (hereinafter also referred to as own vehicle) to be controlled which is under automatic driving control.
[0029]Connected to the running plan creating ECU 10 are an own vehicle sensor 20, a perimeter sensor 30, a navigation unit 40, and a communication unit 50 which are mounted to the own vehicle.
[0030]The own vehicle sensor 20 is a sensor for detecting the own vehicle state quantity, e.g., a vehicle speed sensor 22, acceleration sensor, yaw rate sensor, or steering angle sensor. The value detected by the own vehicle sensor 20 is used for computing an estimated value of state quantity of th...
second embodiment
[0058]The running plan creating apparatus in accordance with the second embodiment will now be explained. The same constituents as those of the above-mentioned embodiment will be referred to with the same numerals or letters while omitting their overlapping descriptions.
[0059]The running plan creating apparatus 101 in accordance with this embodiment differs from the running plan creating apparatus 1 in accordance with the first embodiment in the structure of its running plan creating ECU 110 as shown in FIG. 6. The running plan creating ECU 110 has a data storage part 111, a characteristic learning part 112, an action predicting part 113, an unsafety degree computing part 114, an unsafety degree distribution setting part 115, a running plan creating part 116, and a safety evaluating part 117.
[0060]For a predetermined period in the past, the data storage part 111 stores the data detected by the own vehicle sensor 20 and perimeter sensor 30. The data storage part 111 in this embodimen...
third embodiment
[0078]The running plan creating apparatus in accordance with the third embodiment will now be explained. The same constituents as those of the above-mentioned embodiments will be referred to with the same numerals or letters while omitting their overlapping descriptions.
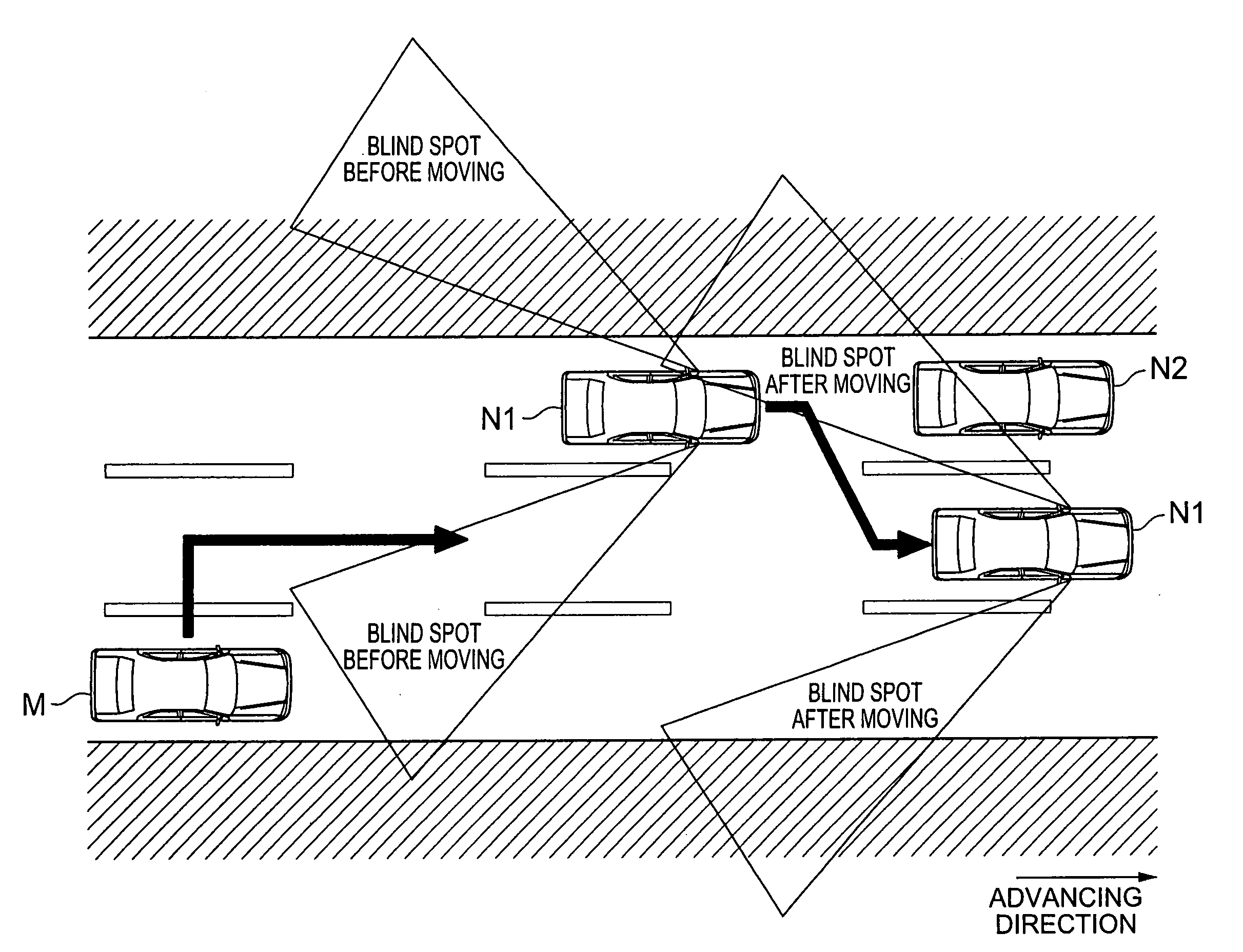
[0079]The running plan creating apparatus 201 in accordance with this embodiment differs from the running plan creating apparatus 1 in accordance with the first embodiment in the structure of its running plan creating ECU 210 as shown in FIG. 9. The running plan creating ECU 210 has a data storage part 211, an action predicting part 213, a running condition setting part 218, a running plan creating part 216, a safety evaluating part 217, a dead spot determination value distribution setting part 215, a dead spot determination value integrating part 219, a running condition urgency determining part 220, a threshold selecting part 221, and an integrated value comparing part 222.
[0080]For a predetermined period in the pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More