

Smooth, spheroidal, appendage free underwater robot capable of 5 DOF motions
a robot and appendage technology, applied in underwater equipment, waterborne vessels, special-purpose vessels, etc., can solve the problems of small disruption to the surrounding, and achieve the effect of creating relatively small disruptions to the surrounding fluid
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
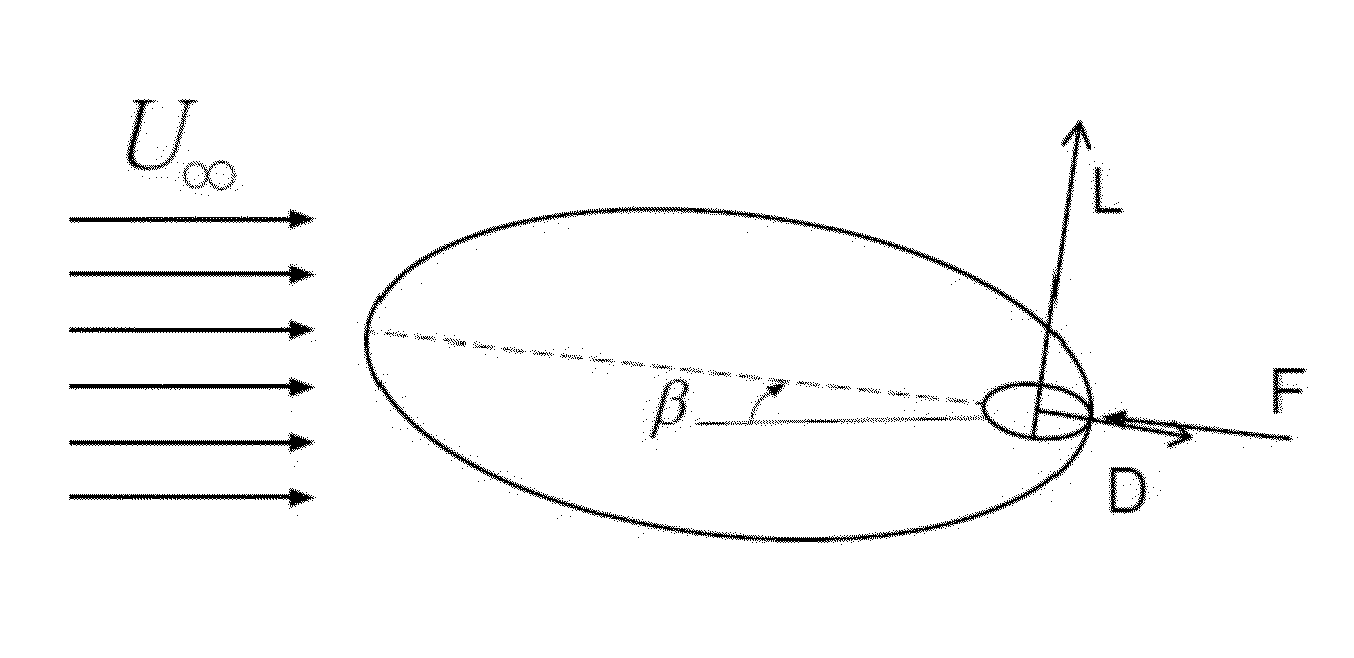
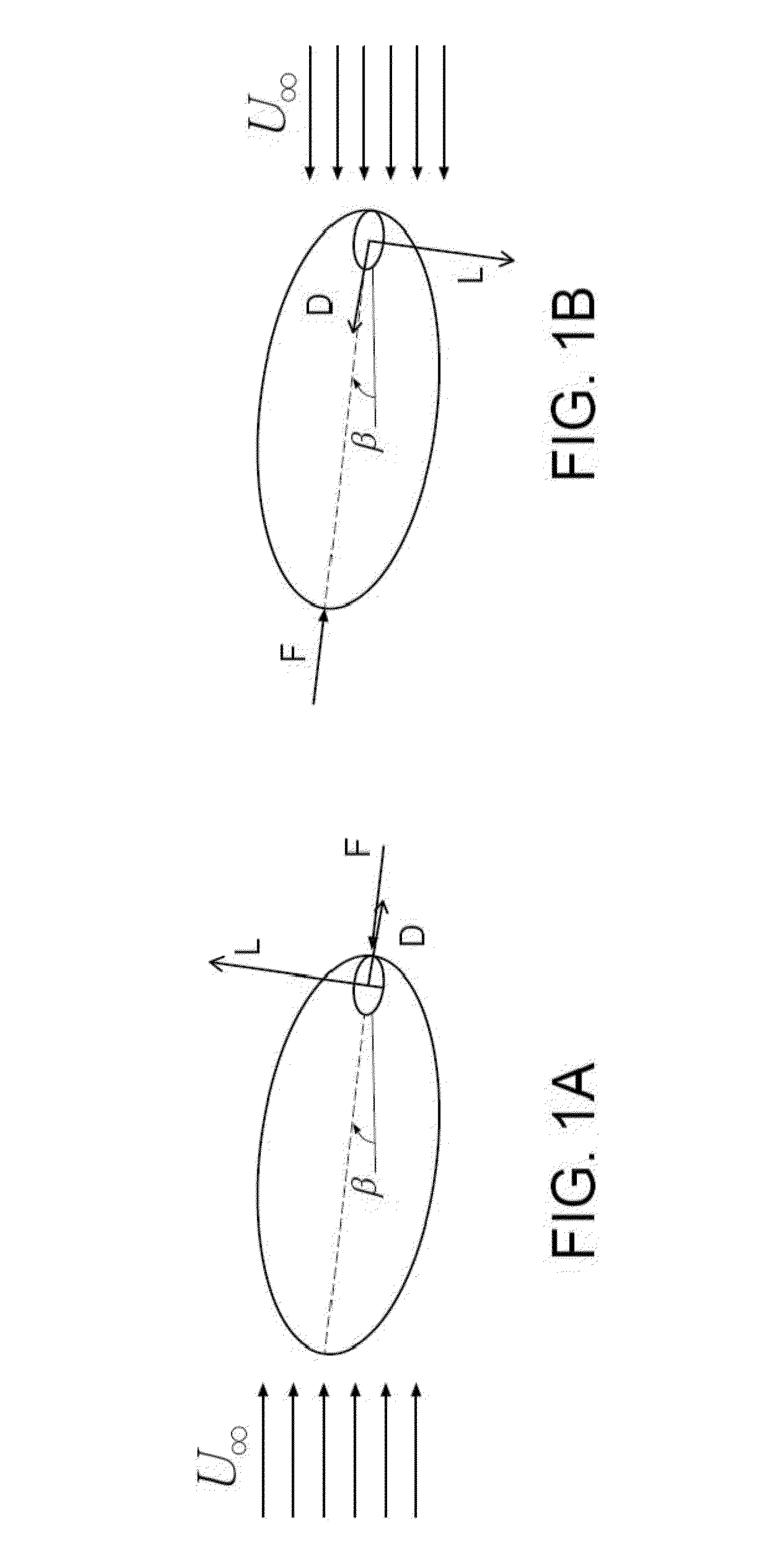
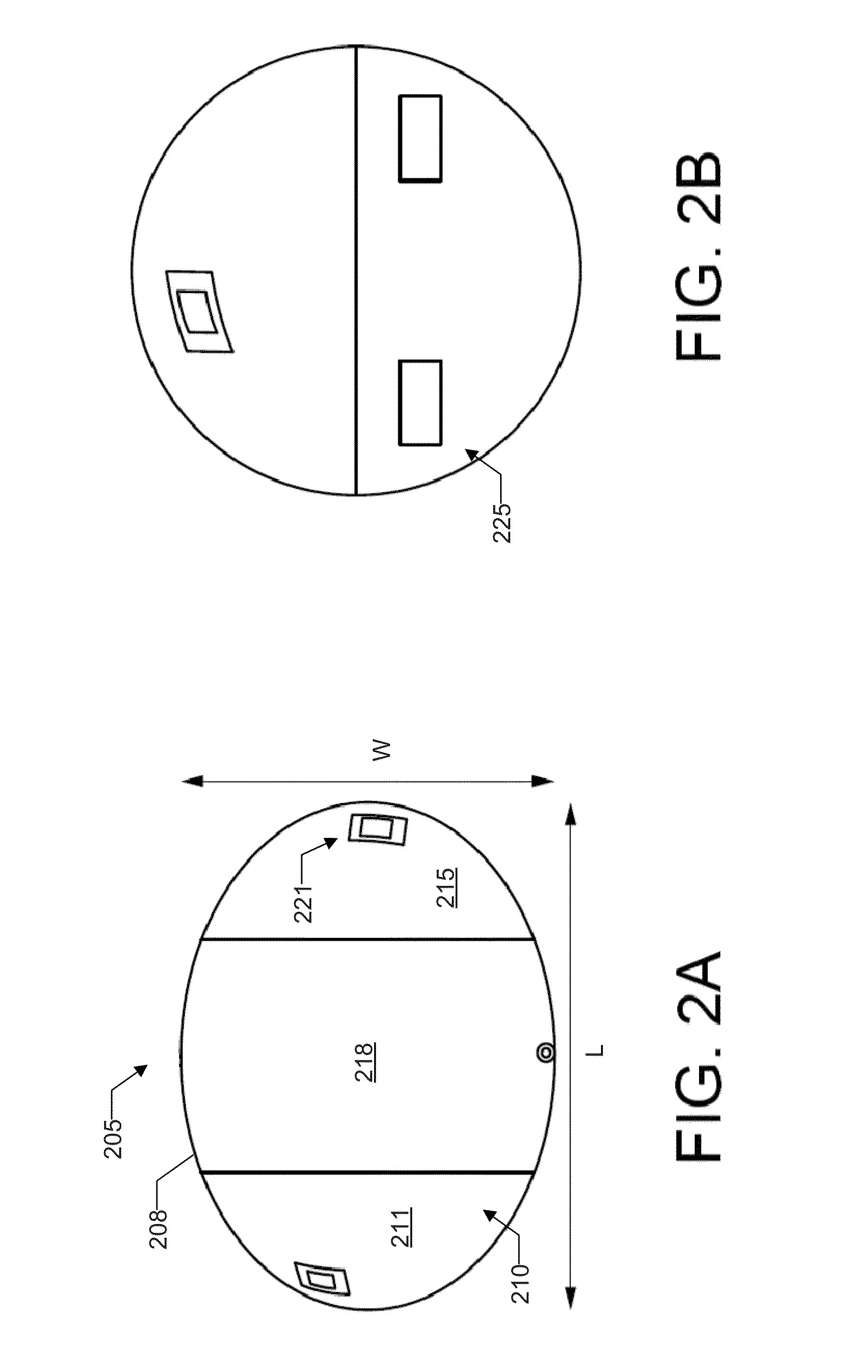
[0033]An underwater vehicle propulsion system is provided that allows a smooth, symmetric underwater robot to move with 5 degrees of freedom (DOF). Maneuvering forces and moments are provided by using internal pumps and valves to eject fluid jets through various exit ports. The degrees of freedom include surge, sway, heave, pitch, and yaw. In a specific embodiment, the vehicle is entirely symmetric and has no external appendages such as propellers or fins. The use of an internal propulsion system allows the robot to operate very quietly and create few disruptions to the surrounding fluid. These robots can be used for a variety of applications ranging from the inspection of water-filled piping structures, to exploration of underwater infrastructure and wildlife, just to name a few examples. In a specific embodiment, the robot is completely or substantially smooth yet capable of stable motions in 5 translations or rotations.
[0034]In a specific embodiment, a smooth spheroidal robot is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More