

Reinforcement learning apparatus, control apparatus, and reinforcement learning method
a technology of reinforcement learning and control apparatus, applied in the direction of electric programme control, program control, instruments, etc., can solve the problems of impeded learning, increased or decreased learning results, and increased difficulty in trade-off problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
embodiment 1
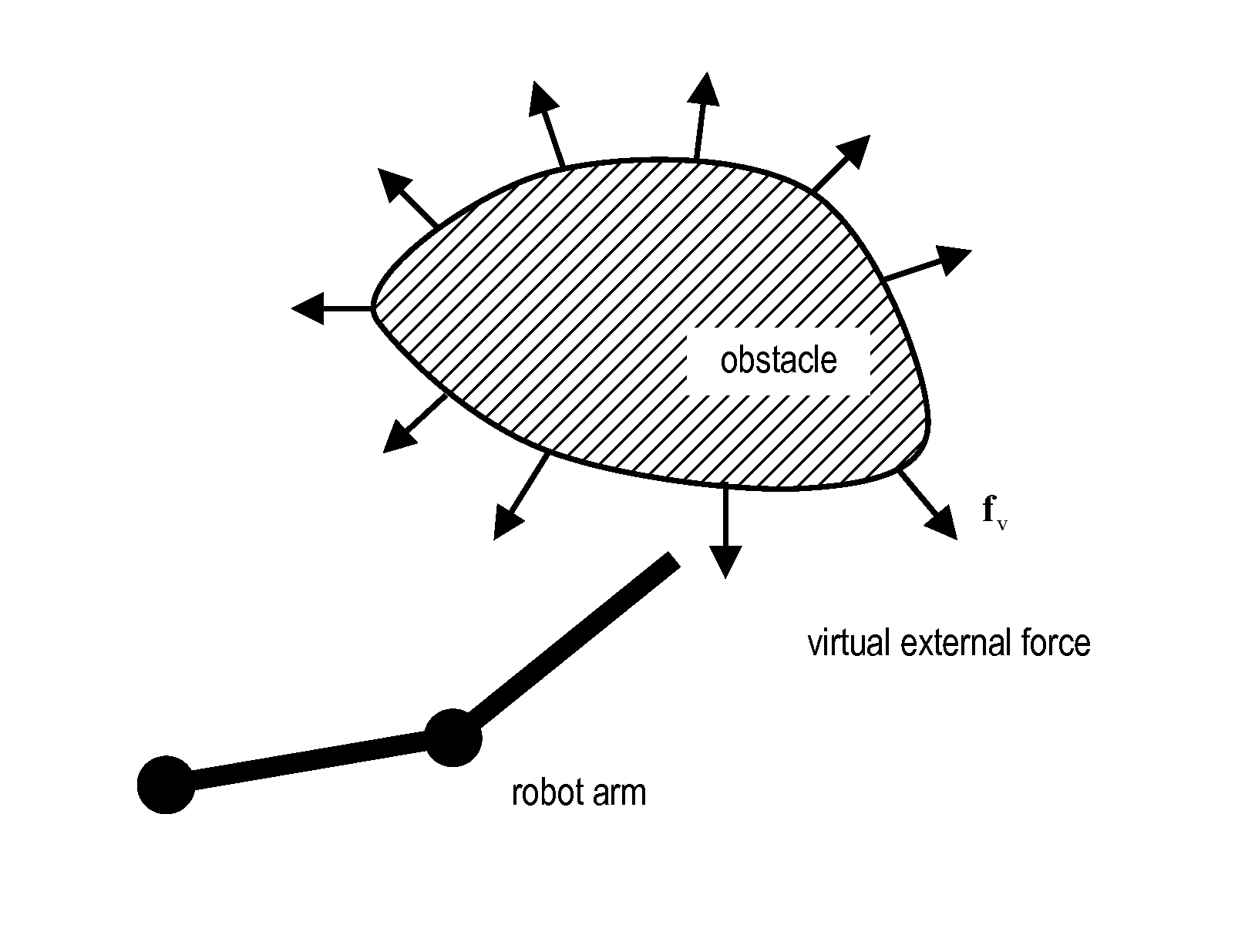
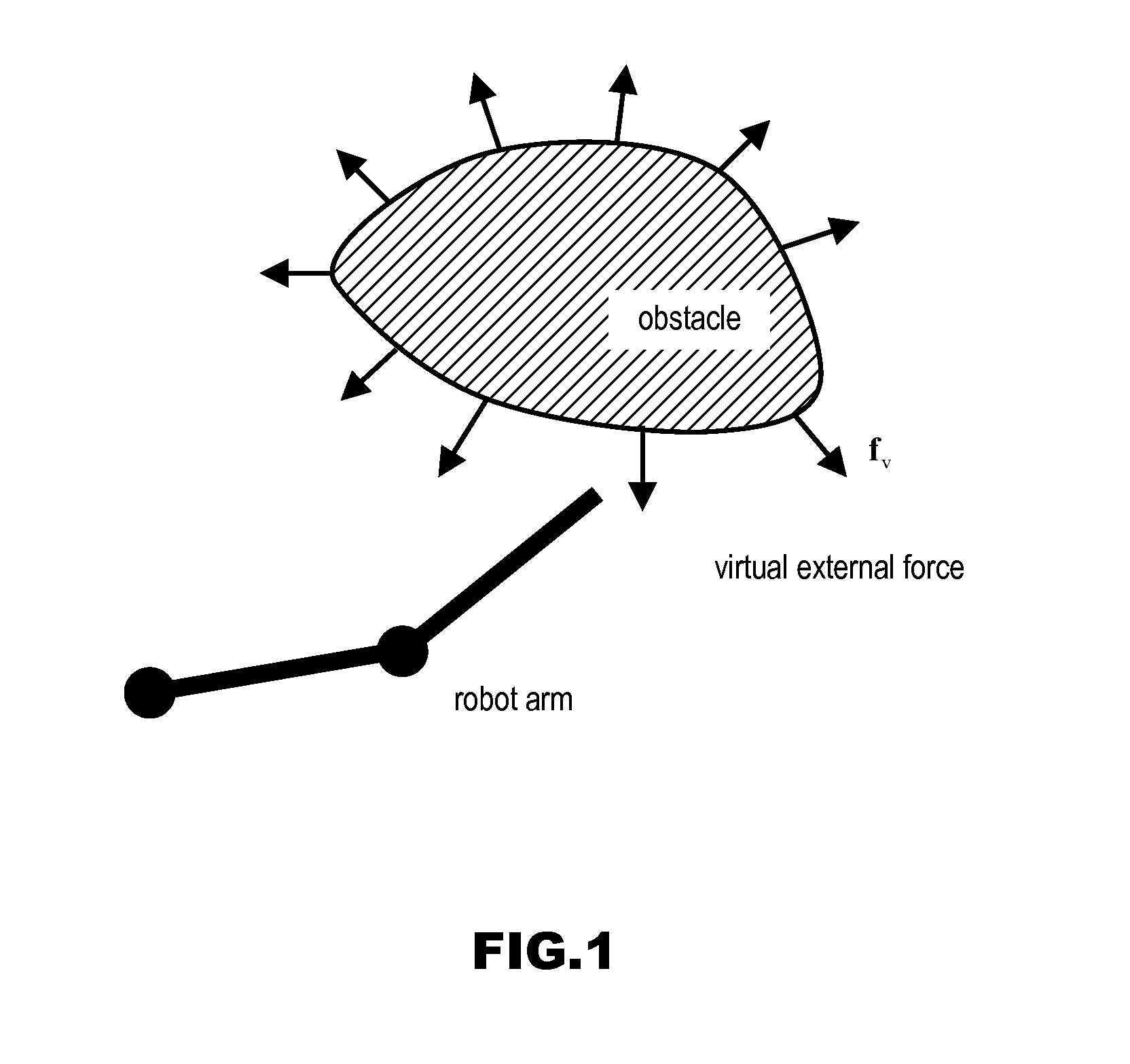
[0038]In this embodiment, a description will be given of a reinforcement learning apparatus and the like that have the function of generating a virtual external force. In this embodiment, a description will also be given of a reinforcement learning apparatus in which a reinforcement learner and a virtual external force generator that constitute the reinforcement learning apparatus are separated. In this embodiment, a description will also be given of a reinforcement learning apparatus capable of performing automatic switching from the virtual external force generator to the virtual external force approximator. In this embodiment, a description will also be given of a reinforcement learning apparatus that can improve the reusability of the virtual external force generator. Furthermore, in this embodiment, a description will also be given of a reinforcement learning apparatus capable of performing model selection for the function approximator.
[0039]FIG. 1 is a schematic diagram illust...
embodiment 2
[0113]In this embodiment, a description will be given of a reinforcement learning apparatus and the like in which the reinforcement learner and the virtual external force generator are not separated.
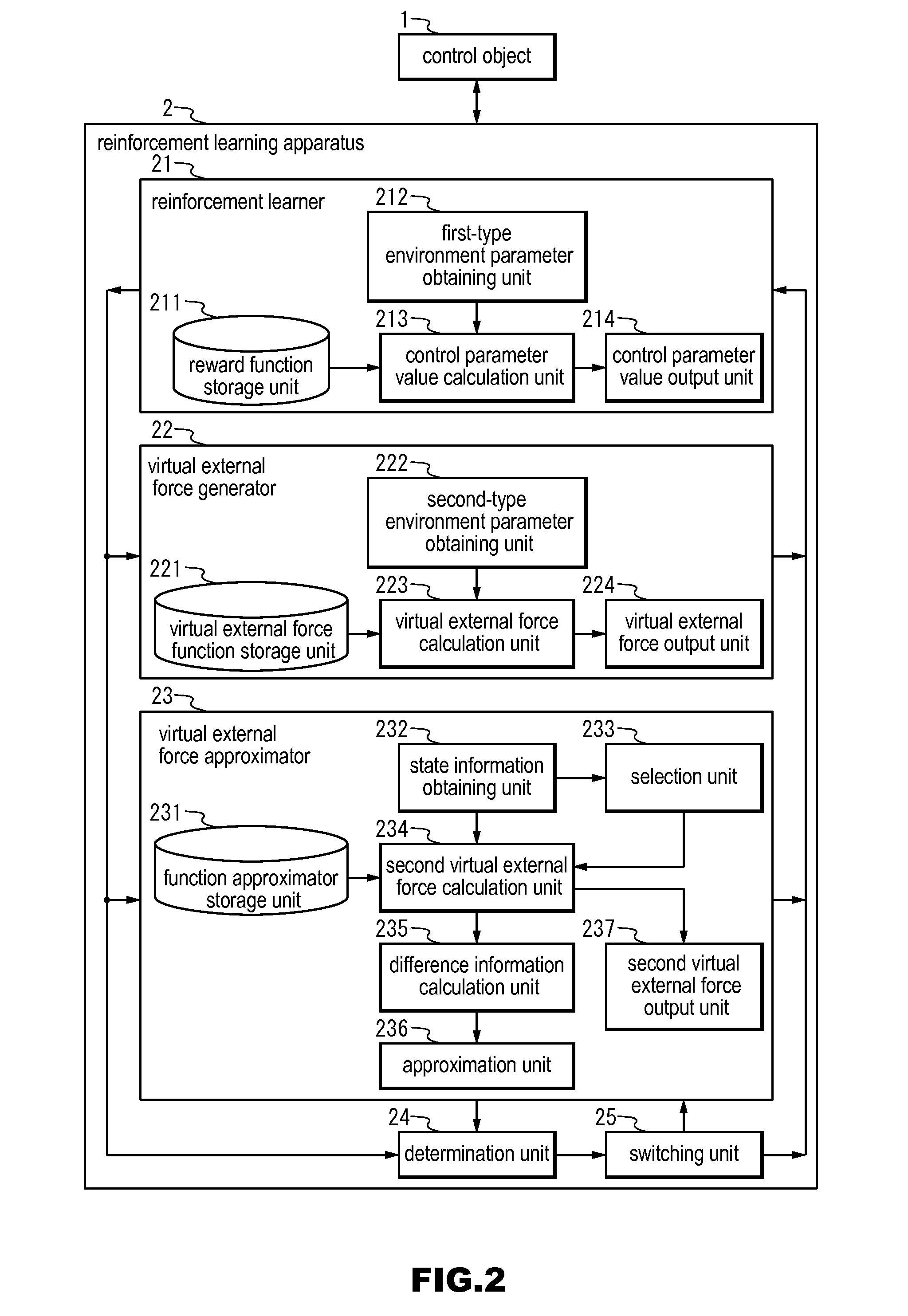
[0114]FIG. 9 is a block diagram showing a reinforcement learning system B according to this embodiment.
[0115]The reinforcement learning system B includes the control object 1 and a reinforcement learning apparatus 3. The difference between the reinforcement learning apparatus 3 and the reinforcement learning apparatus 2 lies in whether the reinforcement learner and the virtual external force generator are separated or not. In the reinforcement learning apparatus 3, the reinforcement learner and the virtual external force generator are not separated.
[0116]The reinforcement learning apparatus 3 includes the reward function storage unit 211, the first-type environment parameter obtaining unit 212, the control parameter value calculation unit 213, the control parameter value output unit 214,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More