

Method for preventing and device for controlling colliding between cooperated manipulators
A control device, robot technology, applied in the direction of computer control, general control system, program control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
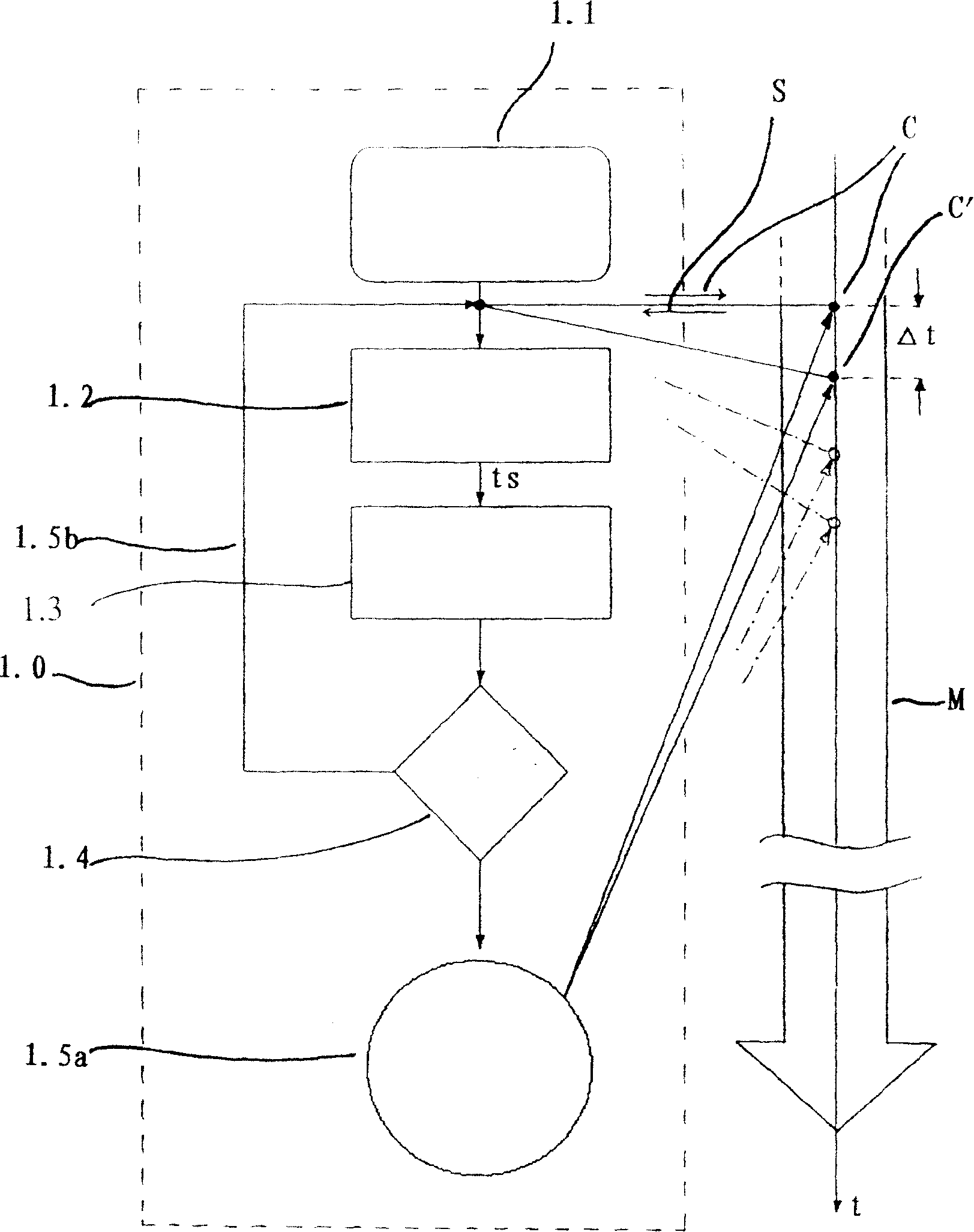
[0077] figure 1 denotes the robot motion M, which is controlled by a known robot controller (not shown) and is to be monitored by a method according to the invention called collision avoidance method 1.0 in order to avoid collisions. During the start-up / initialization phase 1.1, possible collisions between the robot, the tool and stationary objects, ie objects fixed in the work cell, are determined. The work envelope, ie the enveloping surface of the work space entered by the robot, is used to determine whether there are possible collisions with other robots and / or stationary objects. Thereafter, during the movement M of the robot, the collision control C is carried out periodically by the method 1.0 of the invention at times t divided by the time interval Δt.
[0078] Detection data S from the robot and / or the work cell, such as angles and velocities of the robot joints, camera images, etc., are provided to the collision avoidance method 1.0 and utilized together with other ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More