

Force sense man-machine interaction device with six degrees of freedom
A technology of human-computer interaction and degree of freedom, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of large size, poor force sense fidelity, heavy weight, etc., and achieve the effect of large device rigidity, reduced inertia, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
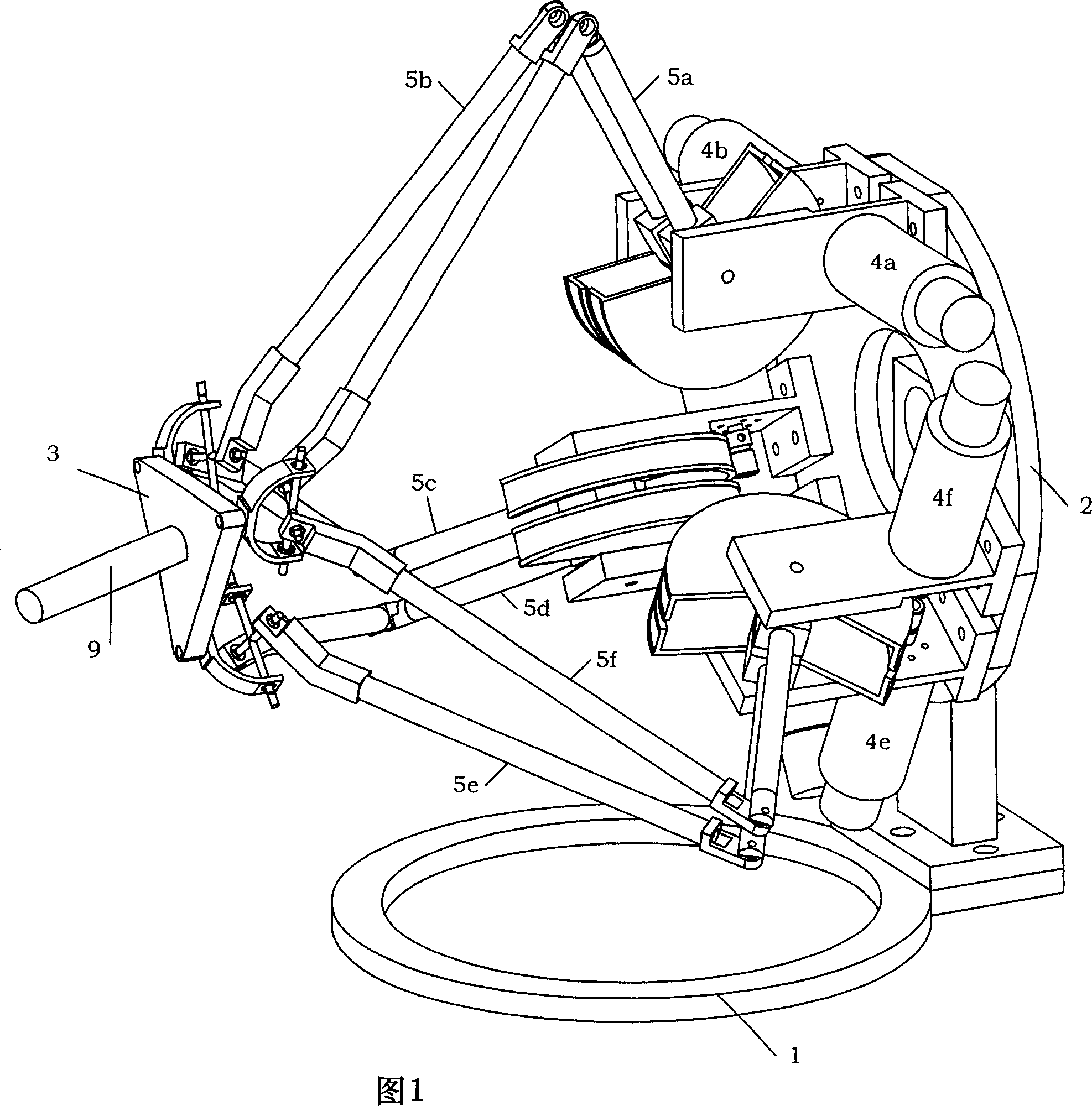
[0024] The present invention will be further described in detail below in conjunction with the accompanying drawings.
[0025] Please refer to shown in Fig. 1, the present invention is a six-degree-of-freedom force-sense human-computer interaction device, which has six degrees of freedom of motion (moving platform 3 can move horizontally, vertically, left and right, and can also rotate independently in three directions ), which can accurately track the three-dimensional translation and three-dimensional rotation information of the human hand, and at the same time enable the moving platform 3 to output a force not less than 20N and a torque not less than 550Nmm. It can be applied to most virtual reality systems and simulation fields, realize the feedback of three-dimensional force and three-dimensional torque in the virtual environment, and enhance the realism and immersion of the human-computer interaction process.
[0026] The present invention is a six-degree-of-freedom forc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More