

Three-freedom active ball-baring
A ball bearing, active technology, used in the field of three-degree-of-freedom active ball bearings, can solve problems such as flexibility and working space.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The present invention will be further described in detail below in conjunction with the accompanying drawings.
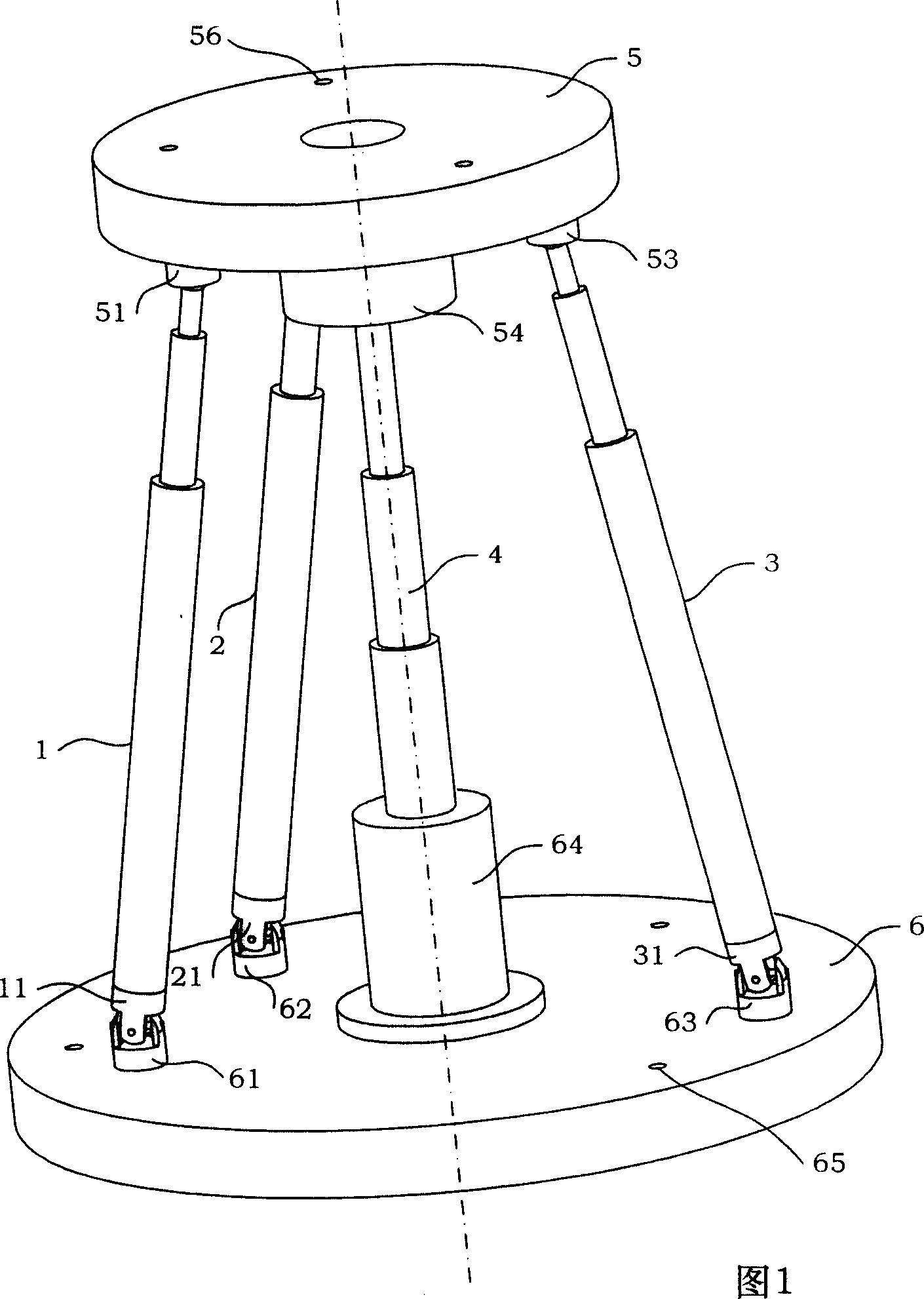
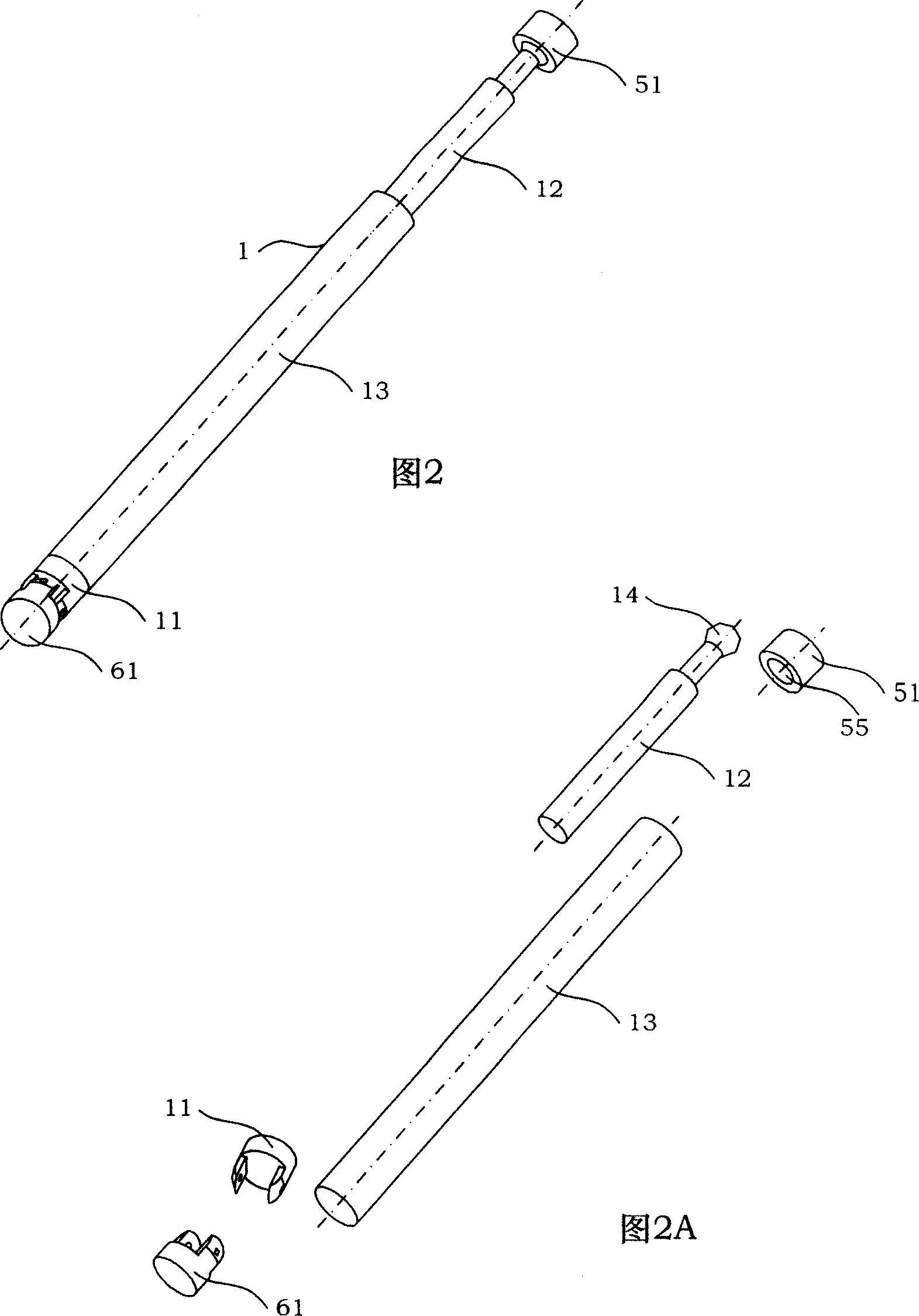
[0011] See also shown in Fig. 1, the present invention is a kind of three-degree-of-freedom active ball bearing that is suitable for use in the hip joint of cockroach robot, consists of three branch chains (the first branch chain 1, the second branch chain 2, the third branch chain Chain 3), a support shaft 4, a moving platform 5 and a static platform 6 constitute.
[0012] The moving platform 5 and the static platform 6 are disc-shaped, circular or quadrilateral, and ball bearings A 51, ball bearings B 52, and ball bearings C 53 are evenly distributed on the circumference of the bottom of the moving platform 5, and the bottom of the moving platform 5 A ball bearing D 54 is installed at the center of the center, and a mounting hole B 56 is provided on the moving platform 5; coupling shaft A 61, coupling shaft B 62, and coupling shaft C 63 are evenly distribut...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More