

Method for man hand, upper limb and lower limb passive exercising
A passive movement, upper limb technology, applied in the field of mechanical technology and medical science, can solve the problem of expensive equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0016] Further explanation is carried out below in conjunction with specific embodiment one:
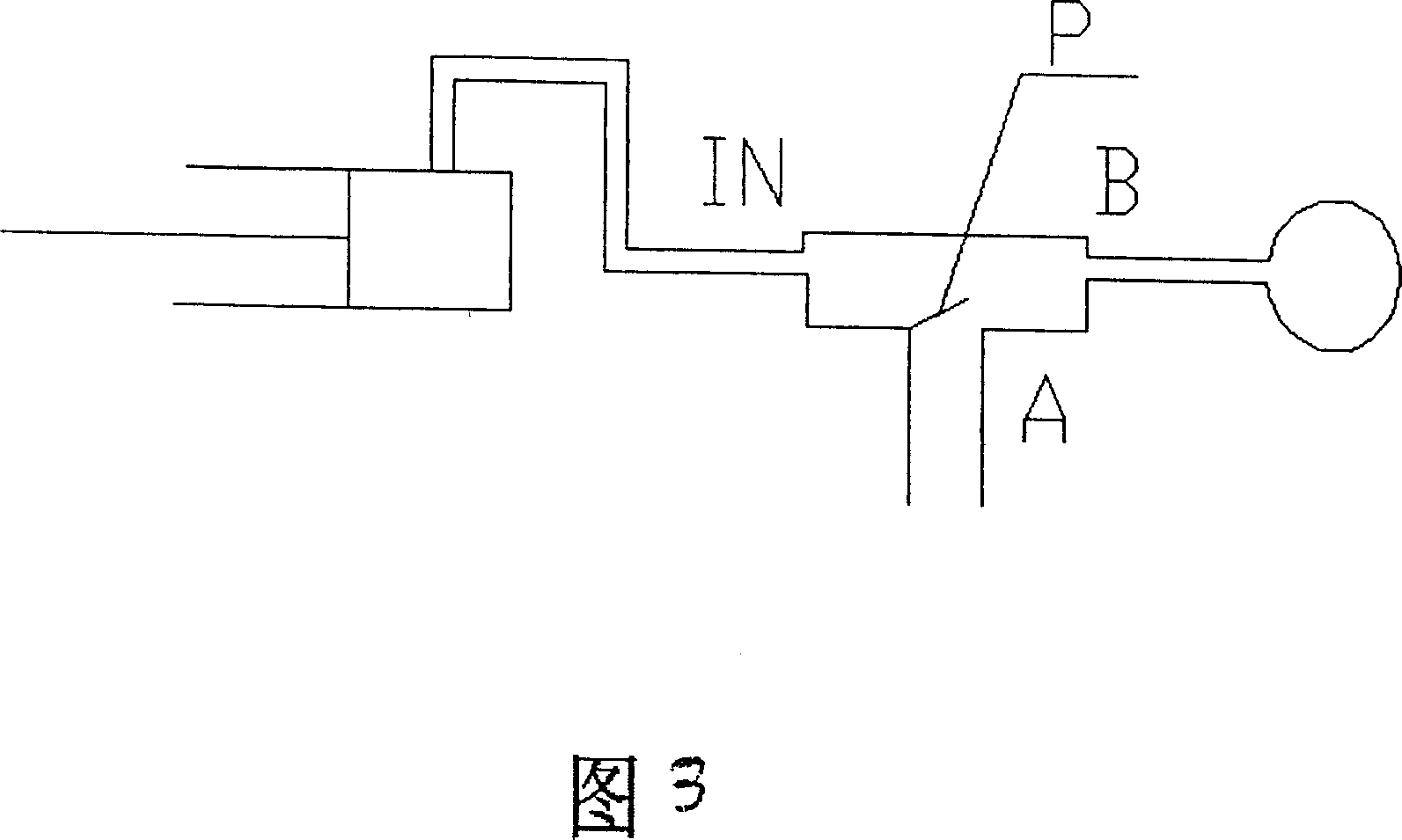
[0017] Air bag (balloon) is positioned under the palm in this example and is realized by strap, and air bag (balloon) and strap are fixed together, and strap can bind the user's bowl.
[0018] The working process of the manual passive movement embodiment is: after the air pump works, inflate the three-way valve from the IN port, the valve plate P covers the A port, and the air directly enters the air bag (balloon), and the air bag (balloon) is inflated. To a certain extent, the valve plate P rotates to cover the IN port, and the air in the air bag (balloon) is released from the B port of the three-way valve to the A port, and the air bag (balloon) is deflated. Certainly also can select the pump that can pump air also can carry out above-mentioned work for use, does not need three-way valve like this, and the mode of realization is thousands of kinds, does not add discussion here.
Embodiment 2
[0020] The example in Figure 5 is that a person takes a sitting posture, and a point suitable for traction is constructed at a suitable position on the upper part of the chair where the person sits. A power source is arranged on this point, and the action of this power source can drive the movement of the upper and lower limbs.
[0021] Below by the specific embodiment two that adapts to it, this invention is described further:
[0022] In Fig. 5, the person gets sitting posture and sits on a chair, and one end of the traction rope 1 is connected to the foot bowl and the sole of the foot of the lower limb. The other end is wound on the motor 7 through the guide wheels 2, 4, 5, the guide wheels 2, 4, 5 are fixed on the bracket 3, the motor 7 rotates forward, the traction rope is wound more towards the motor 7, and the lower limbs are pulled by the traction rope 1 to move upwards ;vice versa.
[0023] The traction of the lower limbs can be realized by hanging the soles of the f...
specific Embodiment 3
[0028] The difference from example 2 is that by adding guide wheel 15 and hand mechanism 16, the motor can be replaced by the user to control the amount of movement. The traction rope 1 passes through guide wheels 2, 4, 5 and is wound on the hand mechanism 16 through guide wheel 15. On the spool, the hand crank mechanism 16 can also use a worm gear mechanism to save labor; the winding mechanism can also be wound in the manner shown in Figure 9, the basic idea is that a large circle has a small circle, and the large circle 18 is manually moved, and the rope is wound on the shaft. (Small circle) On 17, the shaft diameter of 17 is very small, such as 30 millimeters, and the large circle that is moved by hand can have a larger diameter, such as 300 millimeters, which saves 10 times the power when pulling.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More