

Electrically powered wheelchair device with rehabilitation mechanical arm
A technology of electric wheelchairs and robotic arms, which is applied in the field of rehabilitation engineering, can solve the problems of limited range of motion of patients and inflexible movement of devices, and achieve the effect of reducing workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
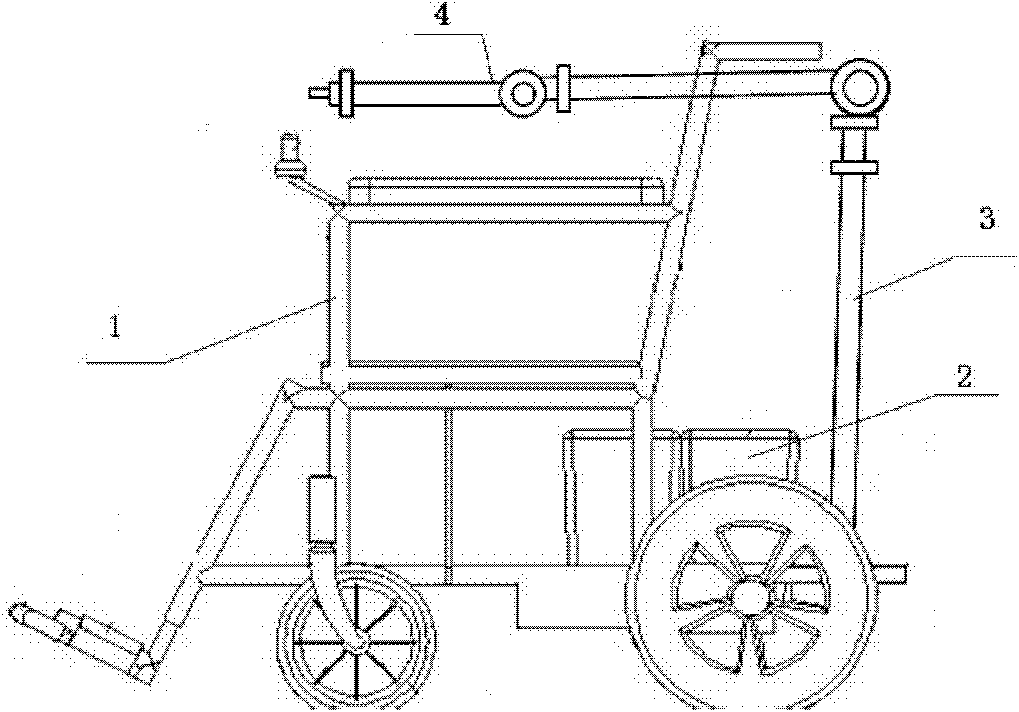
[0022] like figure 1 As shown, this embodiment includes: an electric wheelchair 1, a control drive mechanism 2, a mounting frame 3 and a mechanical arm 4, wherein: the mounting frame 3 is arranged at the rear of the electric wheelchair 1, the mechanical arm 4 is connected to the mounting frame 3, and the control drive The mechanism 2 is arranged at the bottom of the electric wheelchair 1, and the control driving mechanism 2 is respectively connected with the electric wheelchair 1, the installation frame 3 and the mechanical arm 4 to output control driving signals.
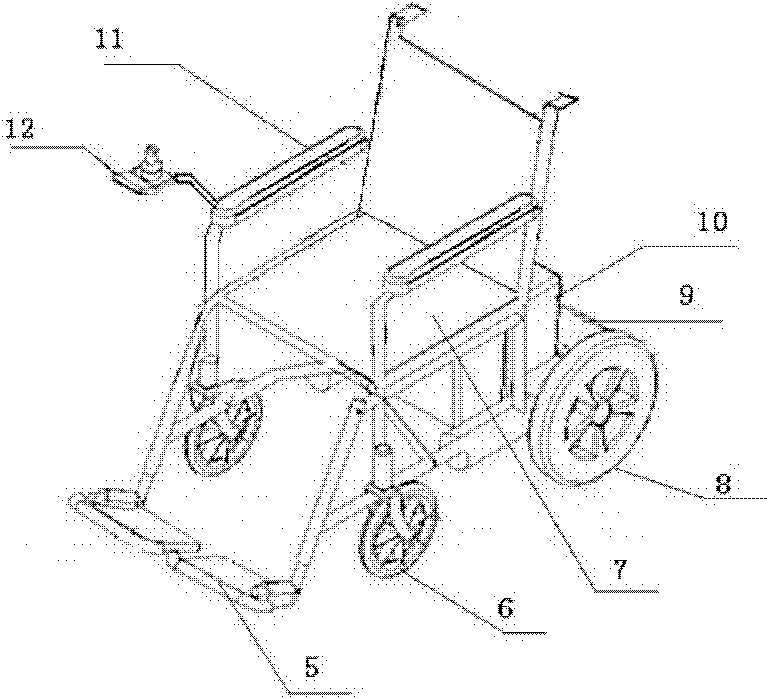
[0023] like figure 2 As shown, the electric wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More