

Mechanical hand with conveying and sampling functions
A technology of manipulators and machinery, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of manipulator sampling failure, maximum transfer sampling speed, inconvenient installation, complex structure, etc., to improve success rate and production efficiency, fast sampling speed, and mobile samples flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
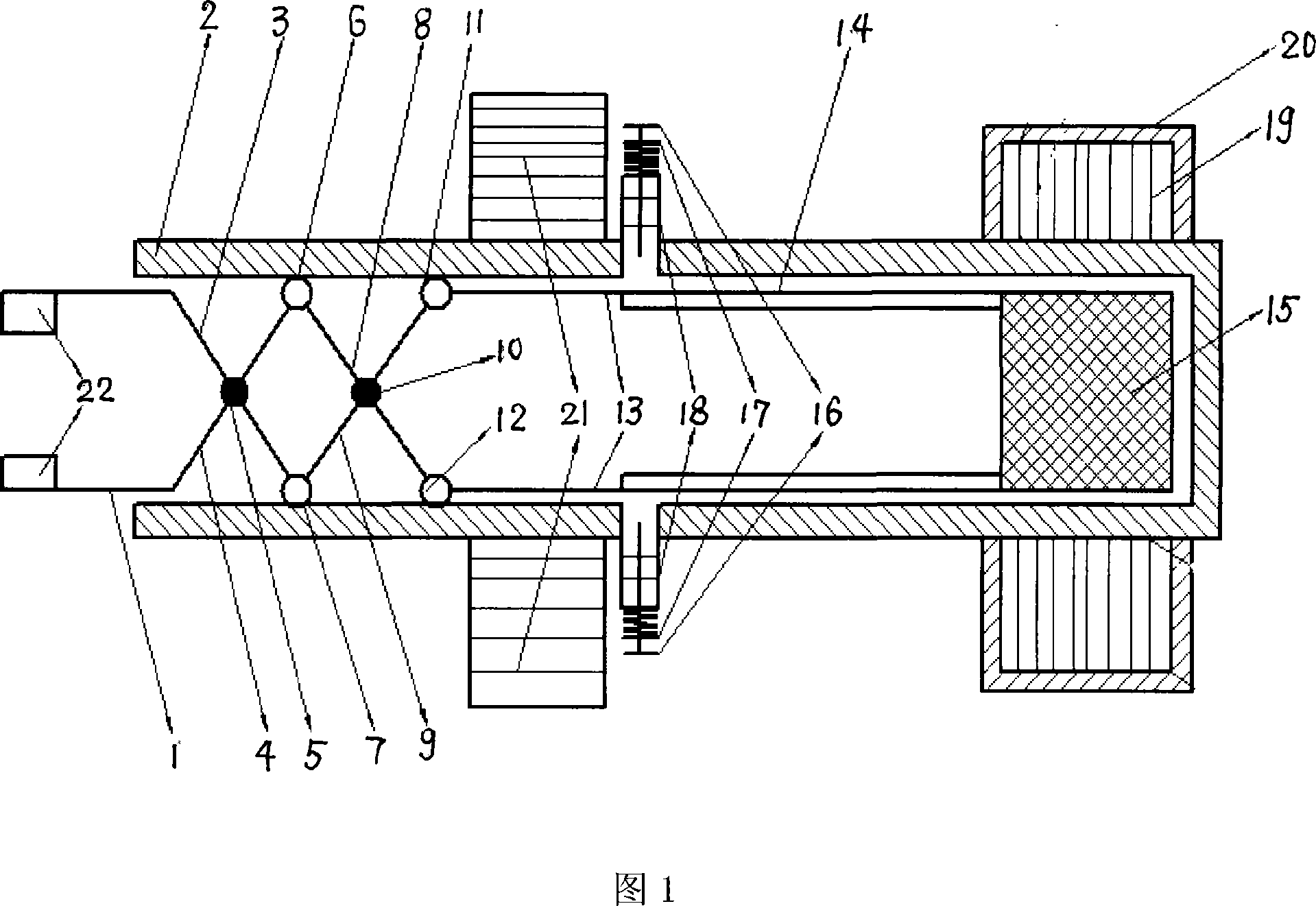
[0007] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0008] As shown in Figure 1, the clamping unit includes a sampling hook 1, a first stainless steel rod 3, a second stainless steel rod 4, a third stainless steel rod 8, a fourth stainless steel rod 9, a first navigation small roller 6, a second navigation small roller 7. The third small navigation wheel 11 and the fourth small navigation wheel 12 . The sampling hook 1 is connected to the front ends of the first stainless steel rod 3 and the second stainless steel rod 4 with good rigidity; the first stainless steel rod 3 and the second stainless steel rod 4 are connected by the first fixed fulcrum 5 of their cross point, the first The other end of the stainless steel rod 3 and the second stainless steel rod 4 connects the front ends of the third stainless steel rod 8 and the fourth stainless steel rod 9 through the first navigation small roller 6 and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More