

Method and system for determining position and orientation of an object
A technology for determining method and orientation, applied in the field of movable units, can solve problems such as the increase of failure probability, and achieve the effect of reducing power consumption, improving accuracy and alleviating technical requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
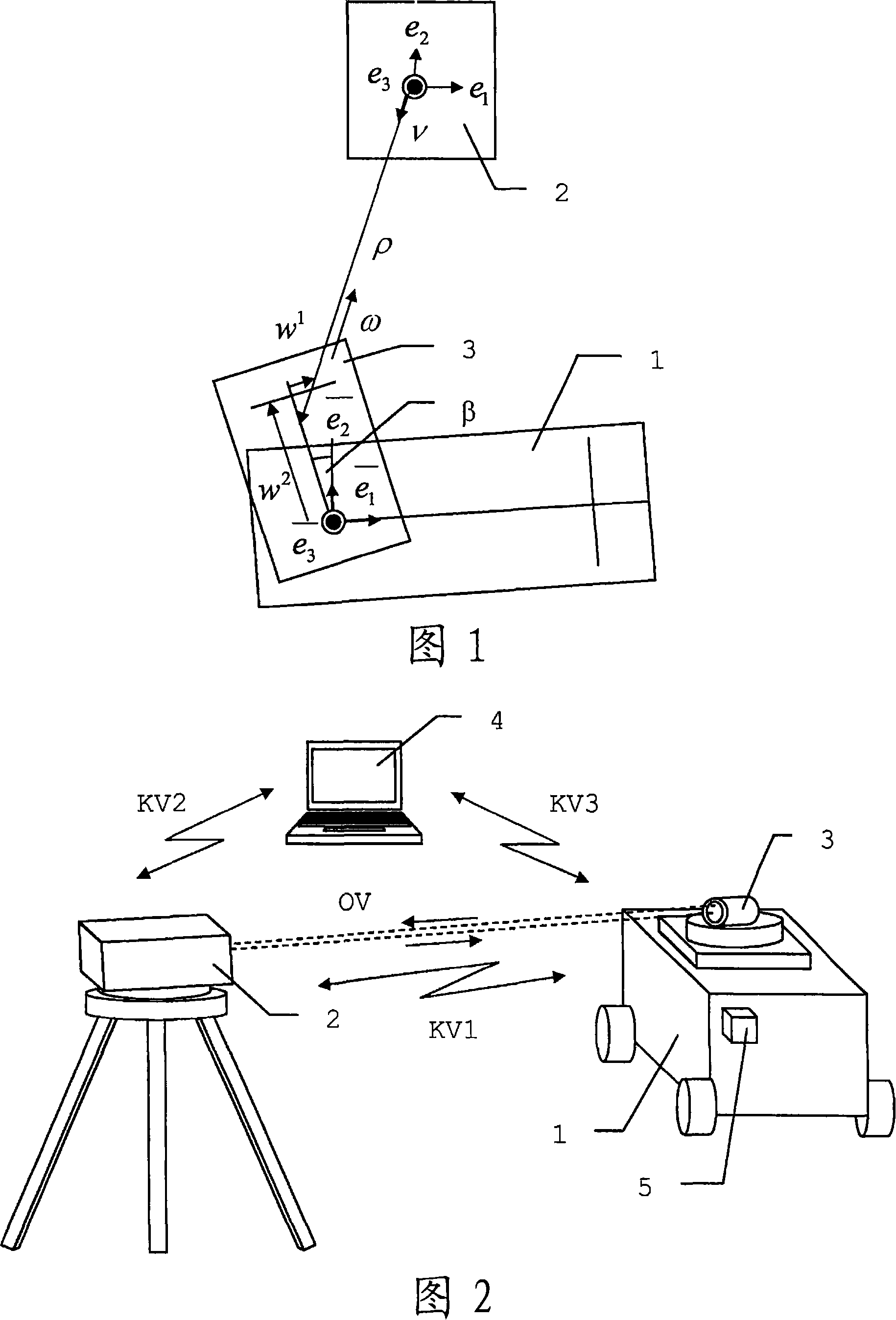
[0044] Figure 1 shows the geometrical relationships on which the orientation determination method is based. On the carrier part 1 of the mobile unit, a receiver 3 is mounted rotatably about a fixed axis, wherein the axis is oriented orthogonally to the optical axis. For the sake of clarity, the illustrations are shown in plan view and without inclination to the horizontal. In general, however, another axis can also be realized for vertical adjustment of the receiver 3 . The laser is emitted by the scanning unit 2 and scanned over an angular range until the receiver 3 is detected and its distance is measured. From this, the distance and angle to the impact point or reflection point on the receiver 3 and thus the position of the receiver 3 are determined. The direction of incidence of the radiation is determined by the receiver 3 so that an orientation relative to this direction and thus relative to the scanning unit 2 can be deduced. These two systems (i.e. scanning unit 2 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More