

Fingertip vacuum adsorbing and fixing device of external space suit glove
A vacuum adsorption and fixing device technology, which is applied to the simulation device, measuring device, suction cup, etc. of space navigation conditions, can solve the problems of EVA gloves that are easily damaged, the clamping force is difficult to control, and the fingertips are easy to fall off, etc., to achieve easy Control, easy-to-use effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
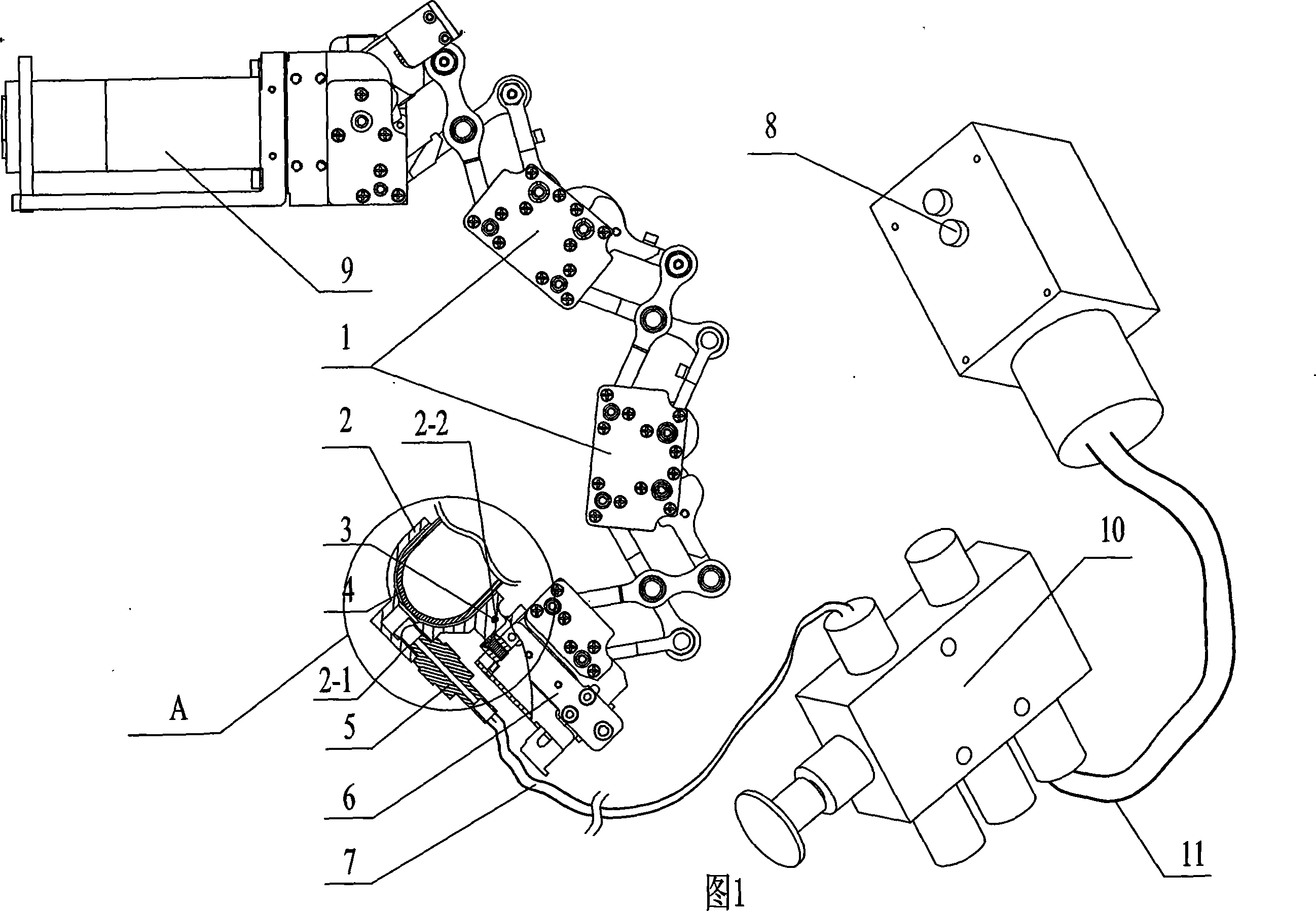
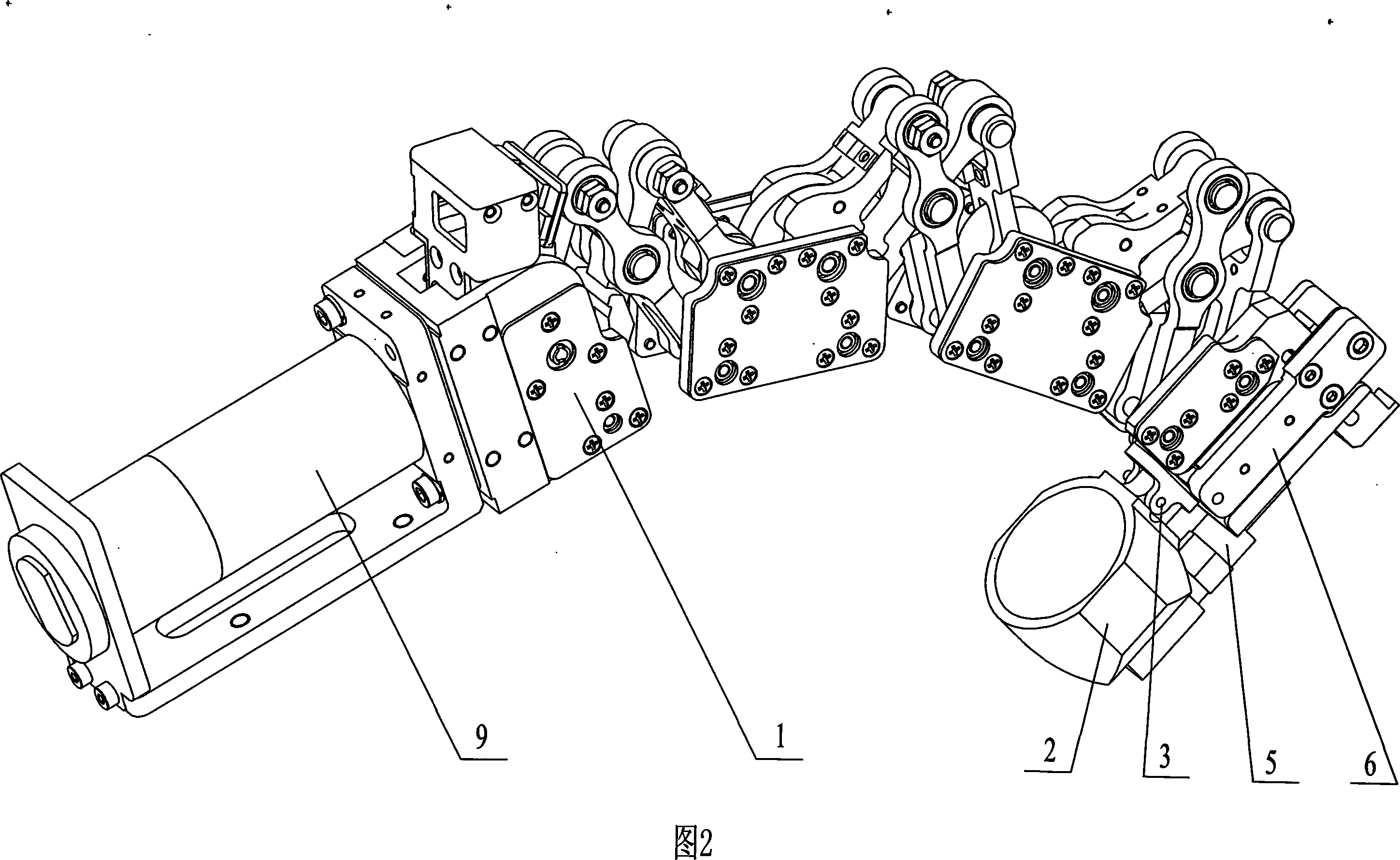
[0007] Specific embodiment one: (referring to Fig. 1, Fig. 2, Fig. 3 and Fig. 4) the extravehicular spacesuit glove fingertip vacuum adsorption fixing device of the present embodiment consists of an adsorption cap 2, a connecting shaft 3, an airway joint 5, a first The air guide tube 7, the second air guide tube 11, the miniature vacuum pump 8 with the motor and the air valve 10 are composed. The adsorption cap 2 is connected to the fingertip sensor 6 of the exoskeleton manipulator 1 through the connecting shaft 3, and the first air guide tube 7 One end communicates with the adsorption cap 2 through the air guide tube joint 5, the other end of the first air guide tube 7 communicates with the air inlet of the air valve 10, and the air outlet of the air valve 10 is connected with the input end of the micro vacuum pump 8 with the motor through the second The air duct 11 communicates, and the inner surface of the adsorption cap 2 and the outer surface of the extravehicular space su...
specific Embodiment approach 2
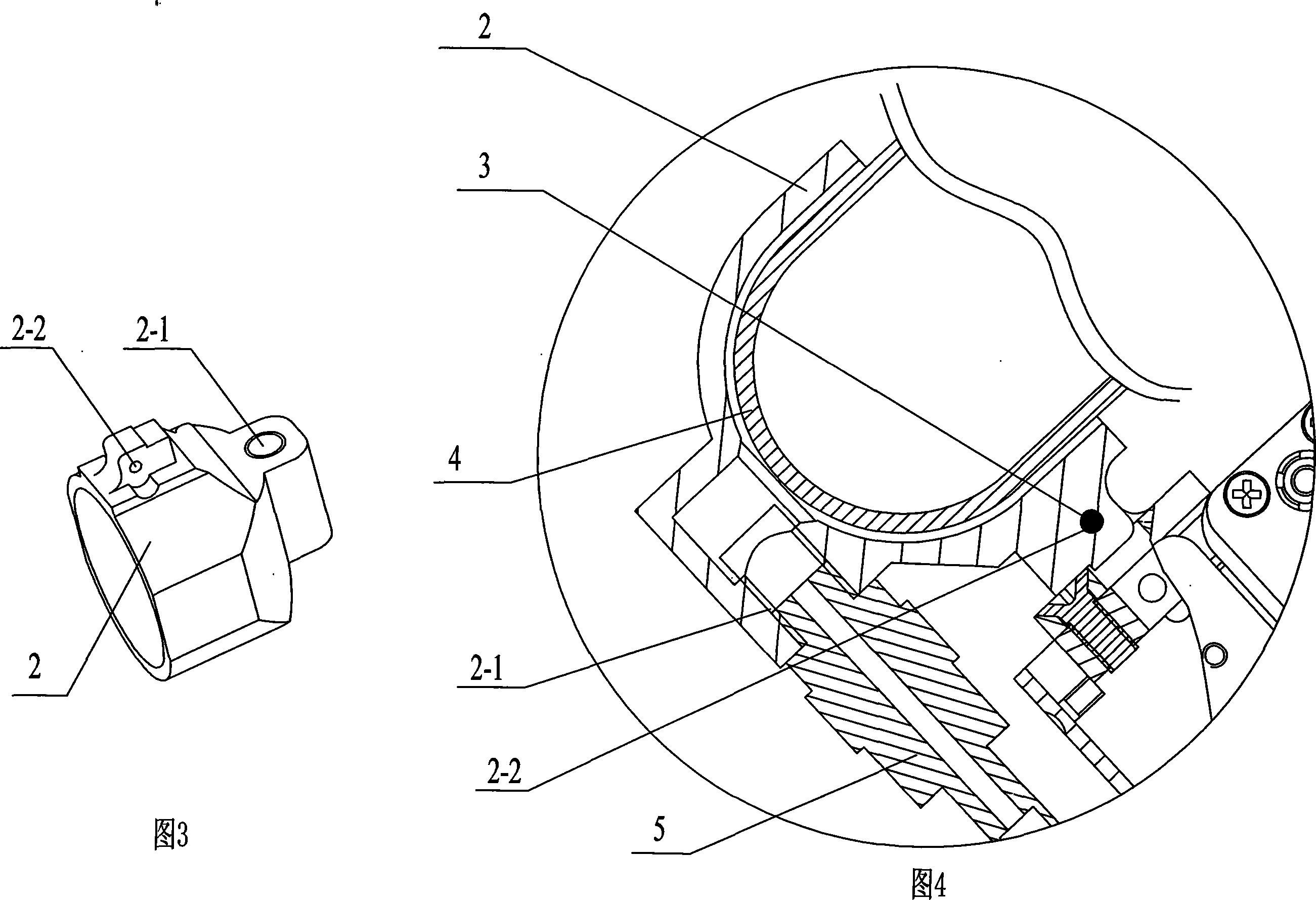
[0008] Embodiment 2: (see FIG. 1 and FIG. 3 ) The contour shape of the inner surface of the adsorption cap 2 in this embodiment is consistent with the contour shape of the outer surface of the fingertip 4 of the extravehicular spacesuit glove. It is designed in this way to make the best adsorption effect. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0009] Specific embodiment three: (see Fig. 1 and Fig. 4) the outer wall of the top end of the adsorption cap 2 described in this embodiment is provided with a connection hole 2-1, and one end of the air guide tube connector 5 is plugged into the connection hole 2-1 Inside. Such a design makes it easy to install and maximizes the adsorption effect. Other components and connections are the same as those in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More