

No-manned machine multi- mode control and switching method
A drone and multi-modal technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problems of complex multi-modal control management, lack of driver decision-making driving and control, etc., to achieve easy implementation , suppression of transient response, safe and reliable switching effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The multi-mode control and switching method of the present invention will be further described below in conjunction with the accompanying drawings.
[0027] The multi-mode control and switching method of the present invention is realized through the following steps:
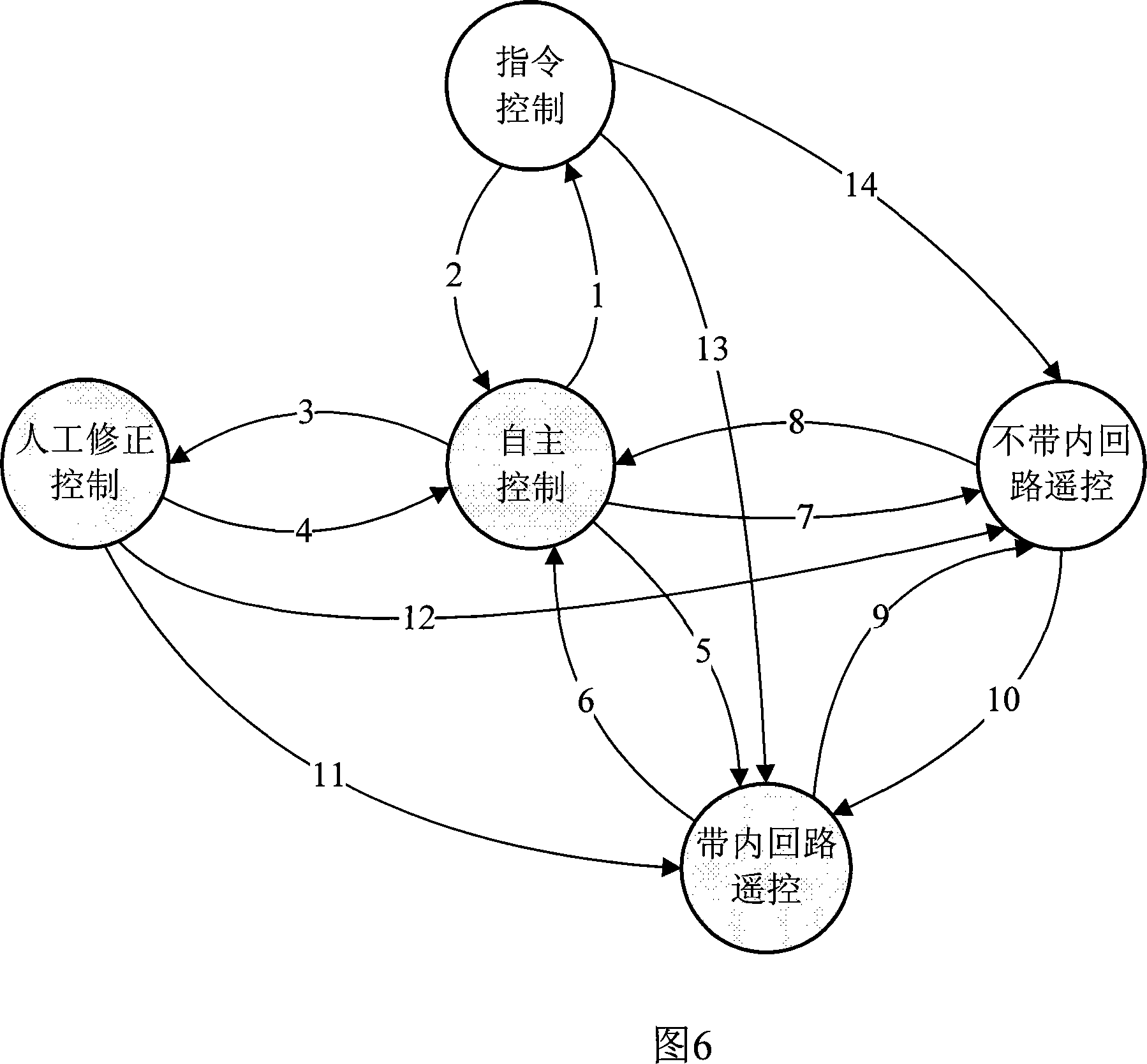
[0028] Step 1: Determine and divide the control modes of the flight control system.
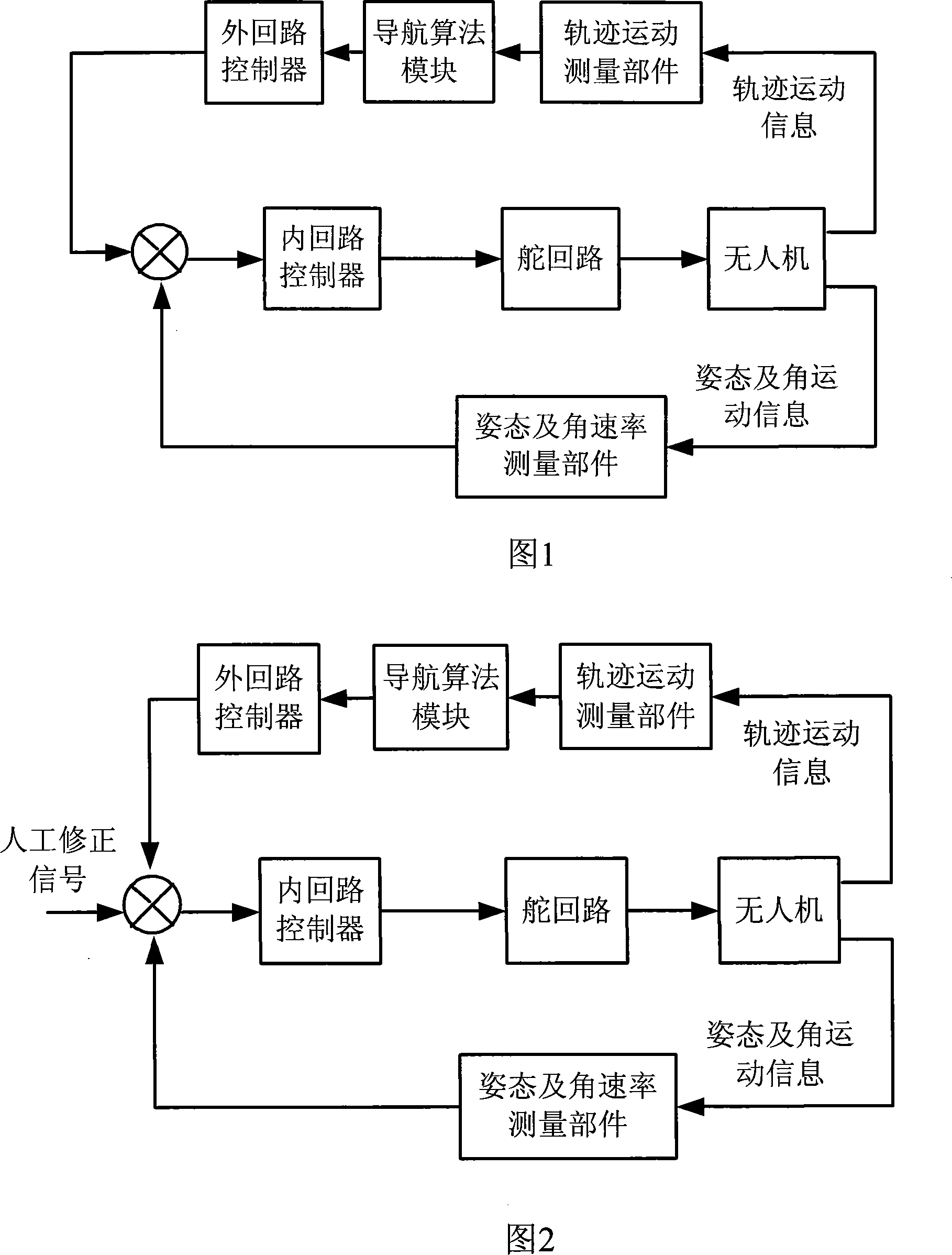
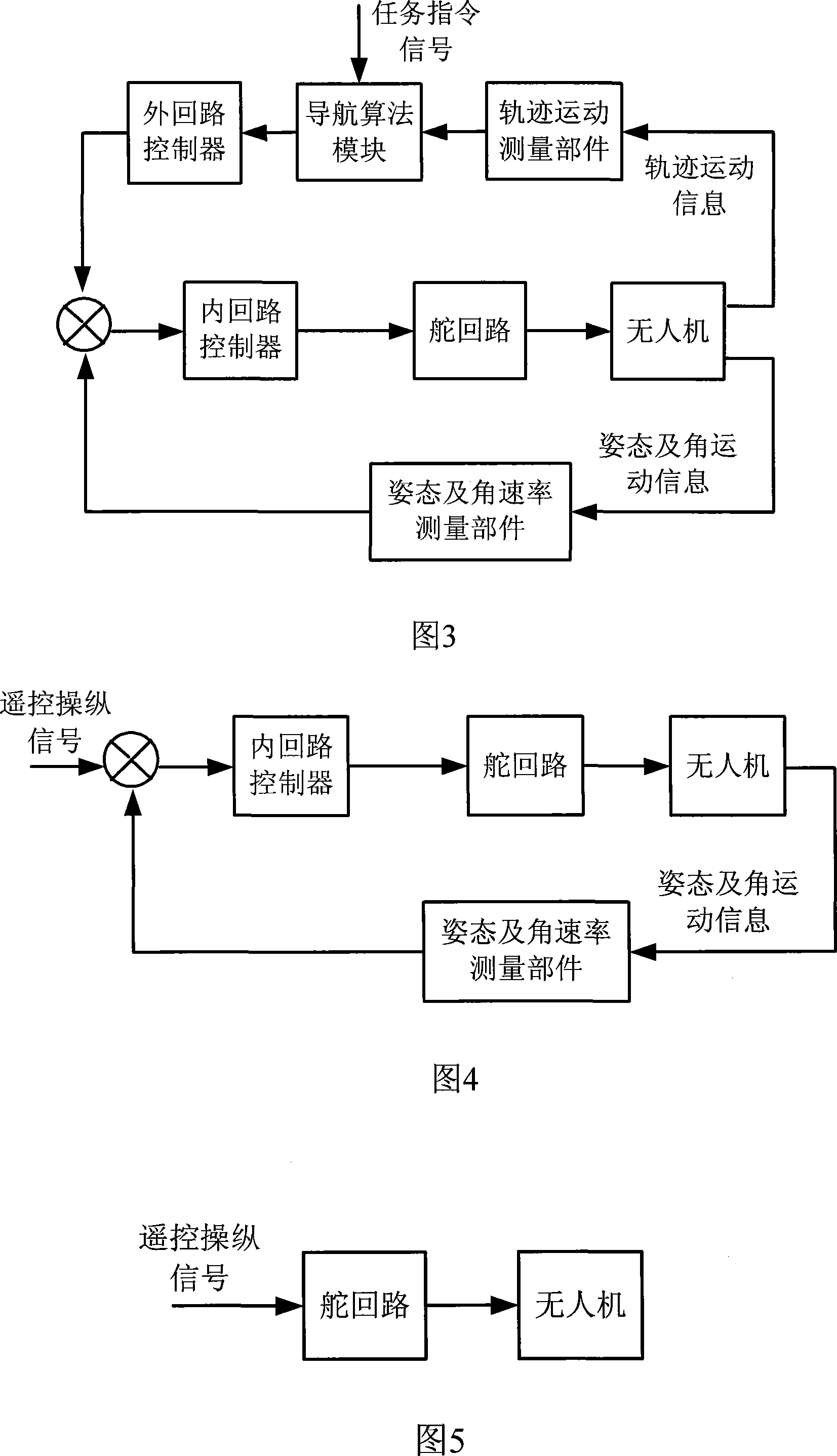
[0029] The early drones were called RPV (Remote Pilot Vehicle), that is, remote piloted aircraft, which were completely controlled by the ground. With the continuous development of science and technology, fully autonomous flying drones have appeared. In the process of fully autonomous flight, the remote control signal still plays a different role in the flight of the UAV. Due to the needs of the UAV to perform tasks, during the flight, the ground operator can use the remote control signal to decide the aircraft to complete the actions such as circling, figure-eight flying, maneuvering flight, and fixed-altitude flight; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More