

Robot control device
A control device, robot technology, applied in program control, general control system, control/regulation system, etc., can solve problems such as interference, low detection sensitivity, and inability to detect the force exerted by the robot hand
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Hereinafter, embodiments of the present invention will be described with reference to the drawings. In the following drawings, the same reference signs are attached to the same components. For easy understanding, the scales of these drawings are appropriately changed.
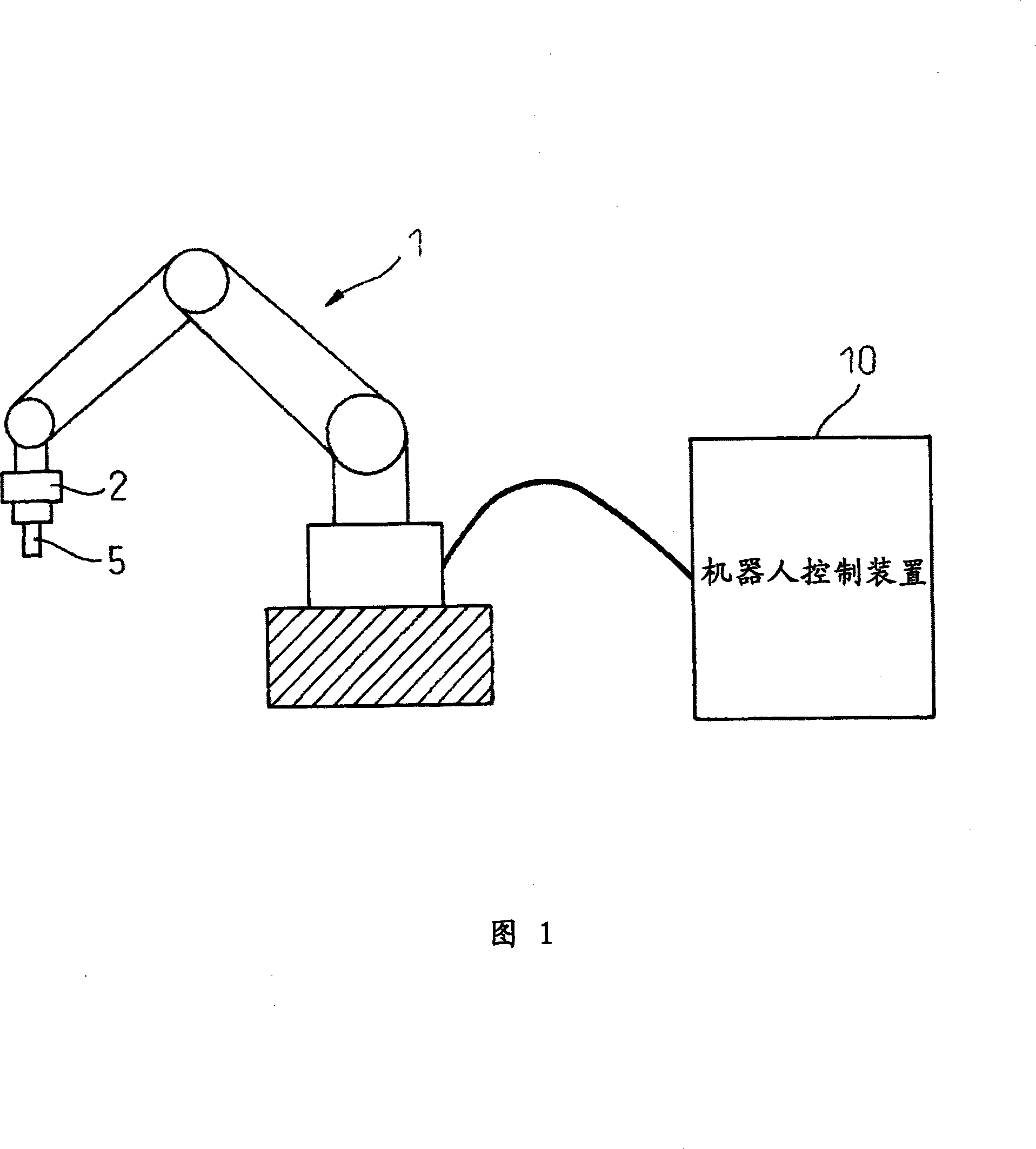
[0035] FIG. 1 is a diagram showing the overall configuration of a robot controller and a robot according to the present invention. FIG. 1 shows an articulated robot 1 . As shown in the figure, a six-axis force sensor 2 is attached to the wrist of the robot 1 , and a hand 5 for gripping a workpiece or the like is attached to the front end side of the force sensor 21 .
[0036] The articulated robot 1 shown in FIG. 1 can freely change the posture of the wrist, so that the workpiece grasped by the hand 5 can be arranged in a desired direction. The six-axis force sensor 2 can detect the force in the directions of the three orthogonal axes (X, Y, Z) and the rotational moment (Mx, My, Mz) of each axis in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More