

Multi-agent dynamic multi-target collaboration tracking method based on finite-state automata
A finite-state, automaton technology that is used in overall factory control, measuring devices, instruments, etc., to solve problems such as the absence of tracking methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
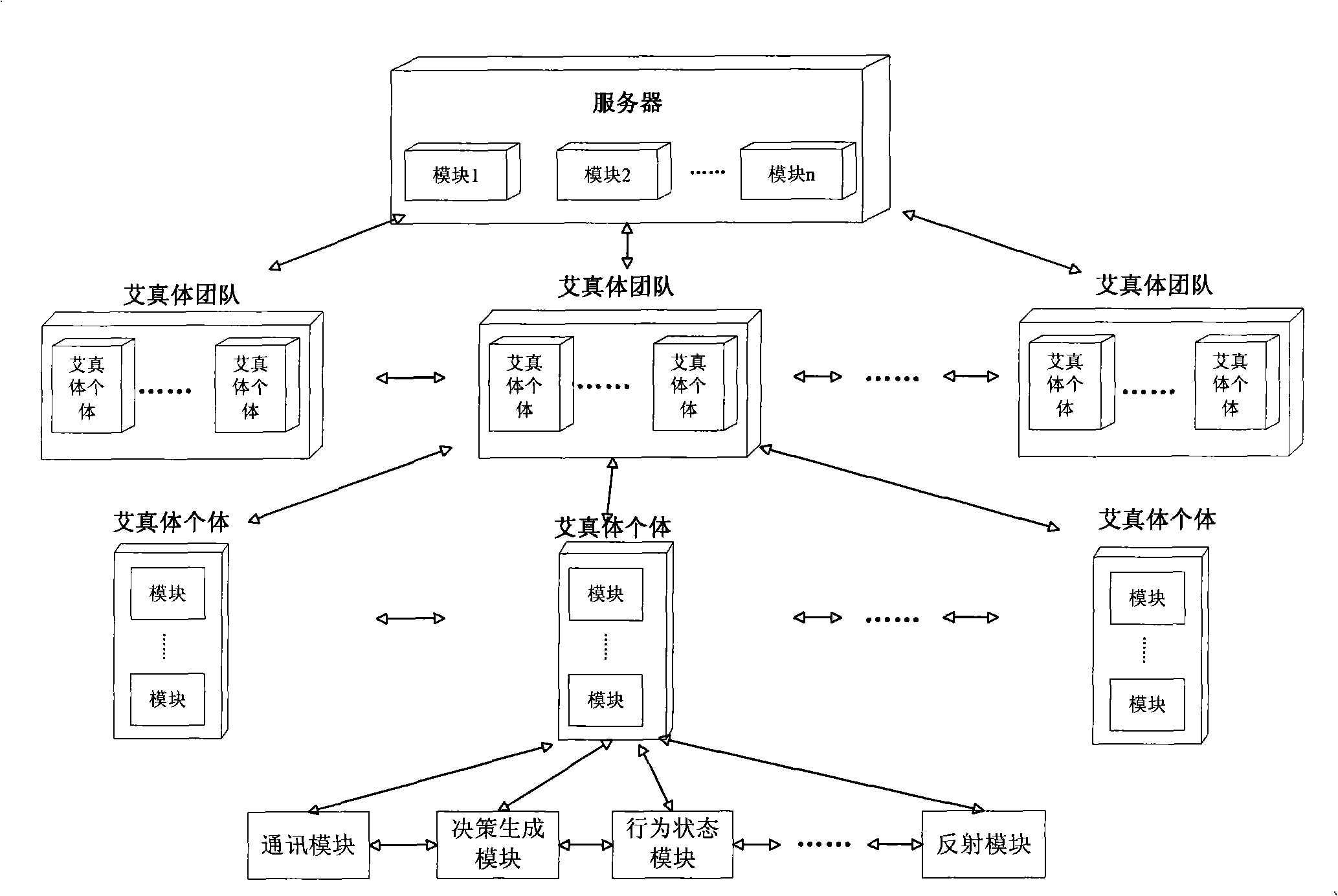
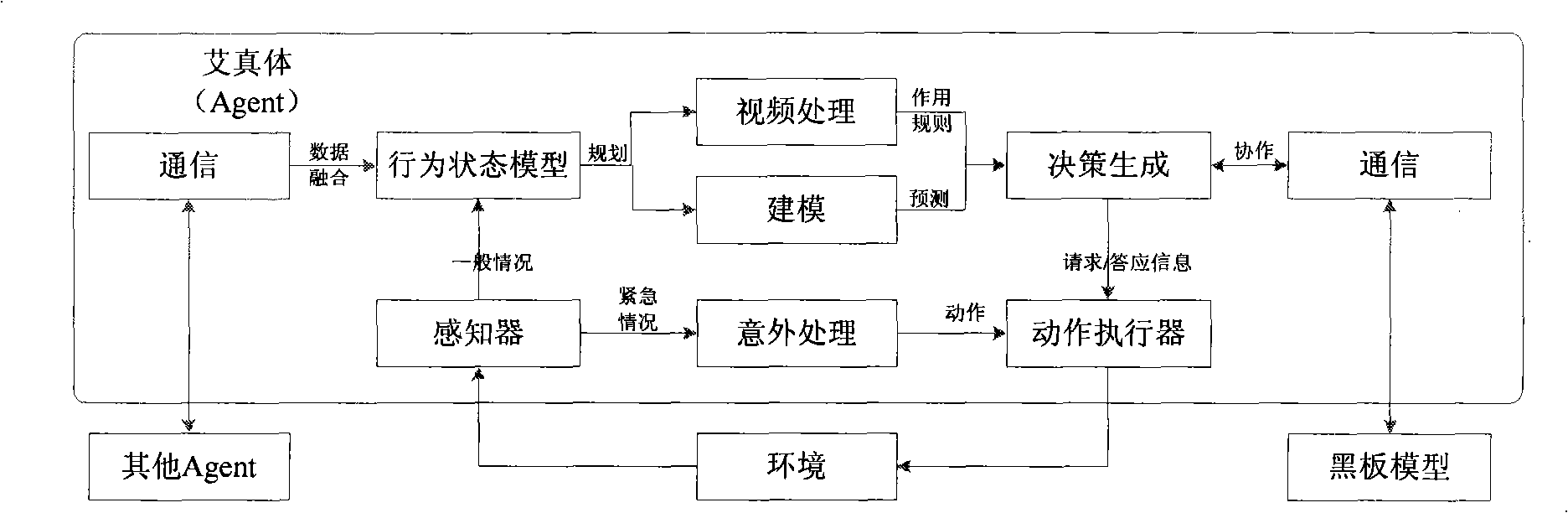
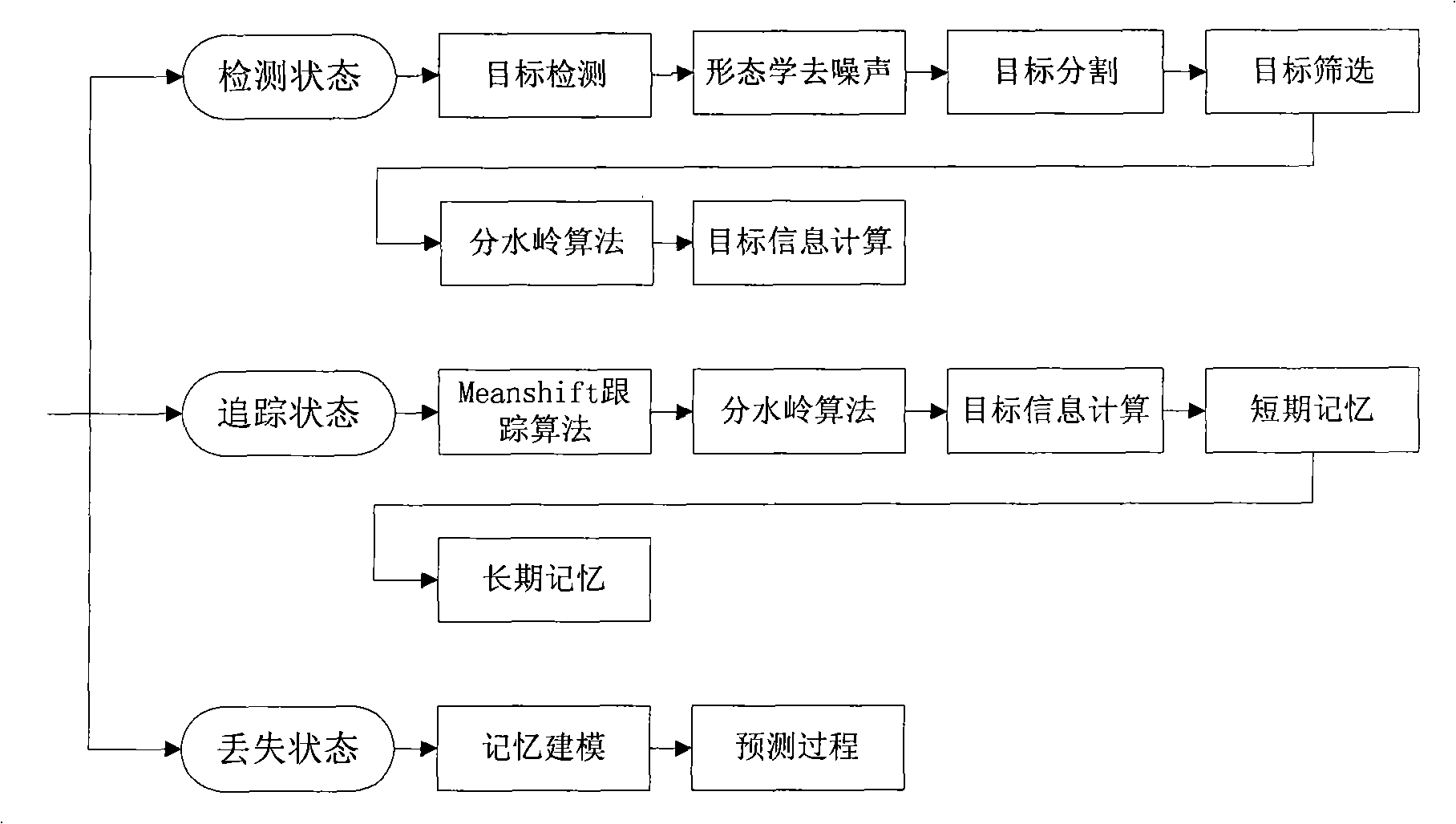
[0068] The present invention proposes a multi-agent dynamic multi-target cooperative tracking method based on finite state automata, and its application basis is a multi-agent system (Multi-Agent System, referred to as MAS). This method is applied to an AI entity that can continue to function autonomously. It selects a finite automatic state machine (Deterministic Finite Automation, referred to as DFA) according to the environment and task requirements to maintain the behavioral state model of the compound AI entity, and then combines the video The environmental information sensed by the device sensor and the shared resources in the AI entity group, communicates, collaborates and negotiates with other AI entities, performs modeling, prediction, planning, and decision-making, and guides the individual AI entities to control the actuators to perform certain actions. . The present invention abstracts the individual AI entity into a composite model. In this model, for the AI e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More