

Robot simulation apparatus
A simulation device and robot technology, applied in the direction of conveyor control devices, instruments, manipulators, etc., can solve problems such as excessive time and difficulty in building a robot production system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Hereinafter, a robot simulation device (hereinafter referred to as "simulation device") related to the present invention will be described based on the drawings. In addition, the same code|symbol is attached|subjected to the common part in each figure, and repeated description is abbreviate|omitted.
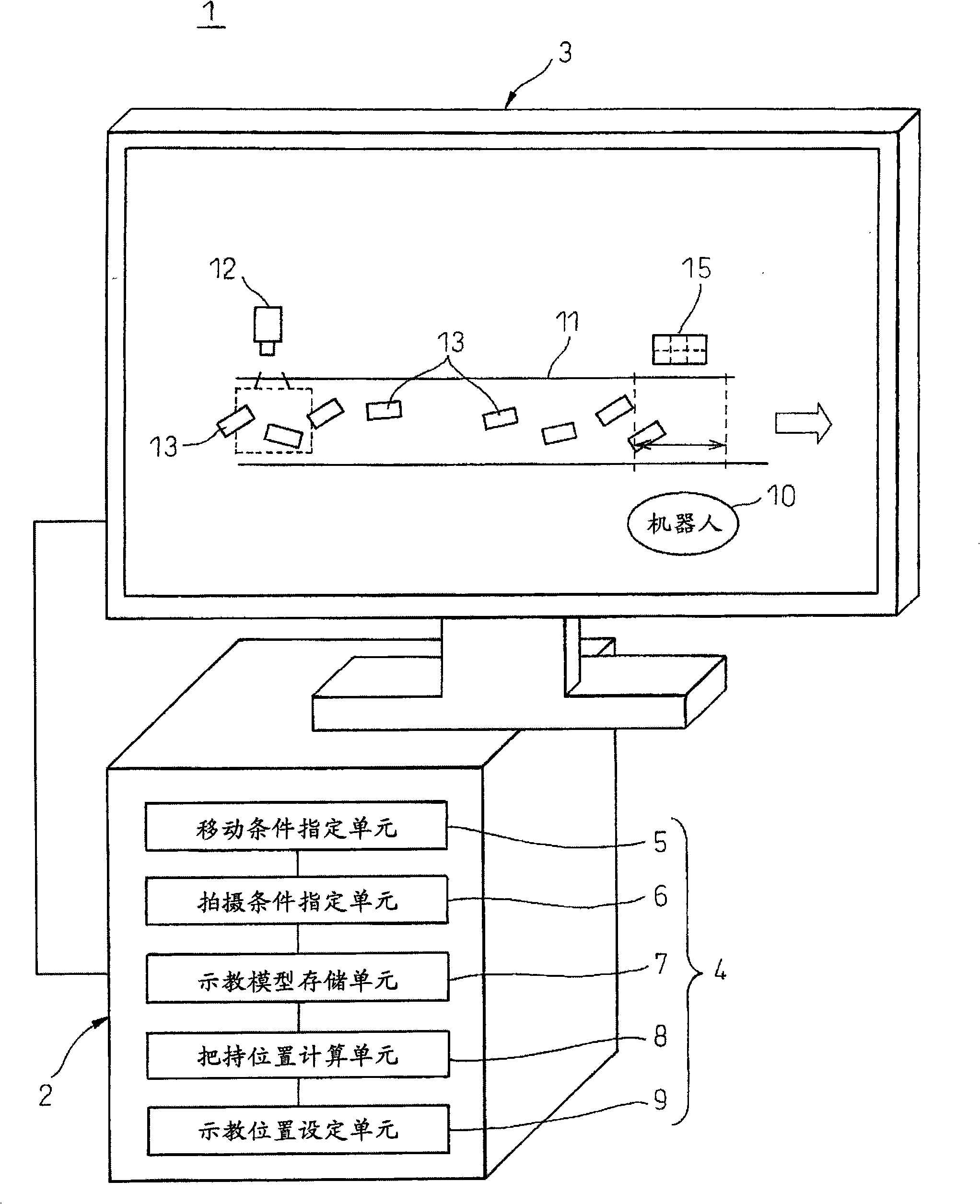
[0032] The simulation device 1 of this embodiment performs image processing on image data captured by a camera, and can simulate the tracking operation of an actual robot that tracks an object conveyed by a conveyor belt (conveying device) and grasps the object at a predetermined position in an off-line state. The picking action of the actual robot, such as figure 1 As shown, it has a device main body 2 with a control function and a display 3 ( figure 1 ). The display (display unit) 3 uses a liquid crystal display, a CRT, or the like, and graphically displays model data and the like of the robot 10 having a manipulator on a screen. Also, while in figure 1 Although not ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More