

Shrimp-shaped six-wheel mobile robot
A mobile robot and steering motor technology, applied in the field of machinery, can solve problems such as subsidence and insufficient load capacity, achieve strong obstacle crossing ability, realize turning operation, and simplify the control system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
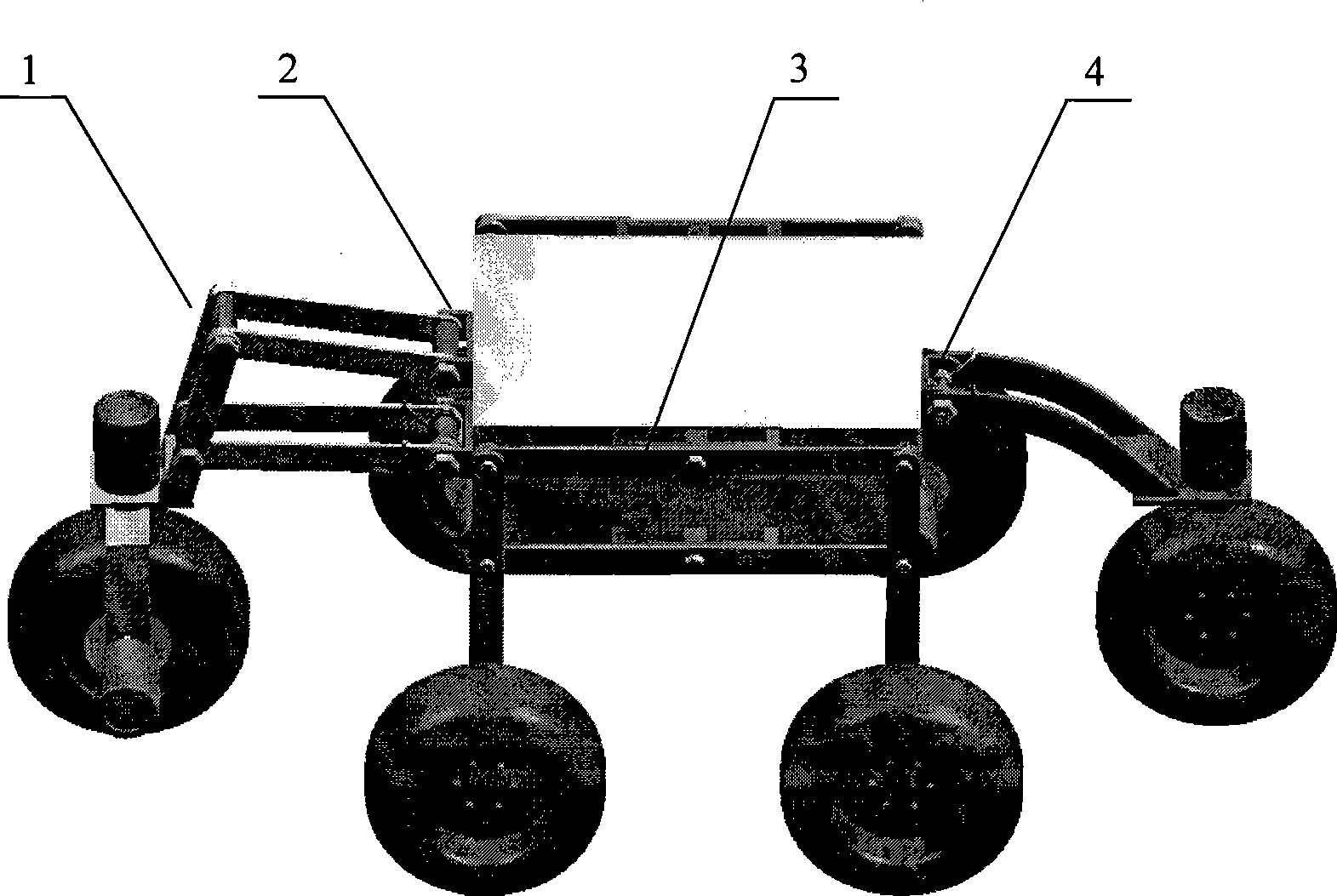
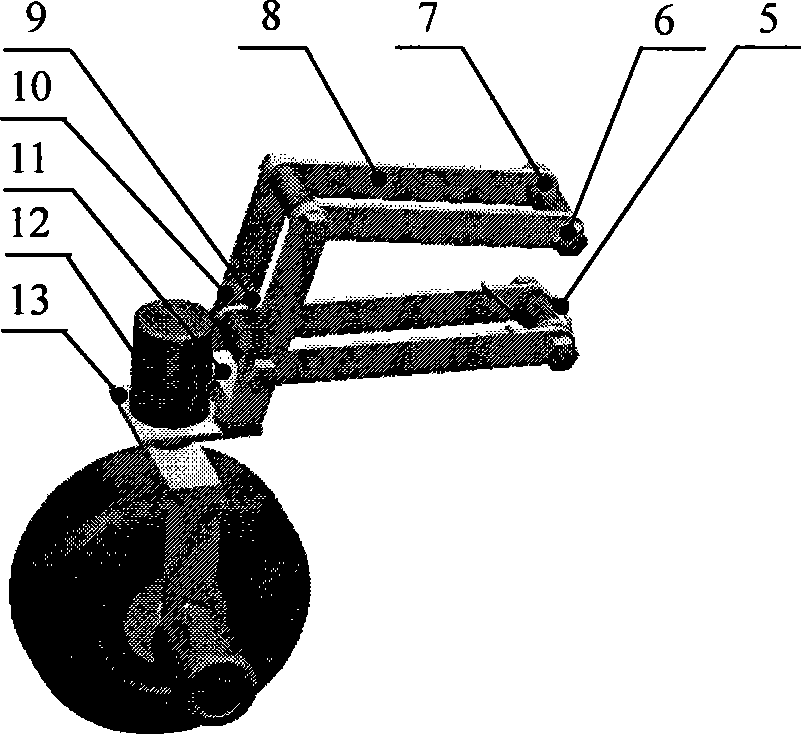
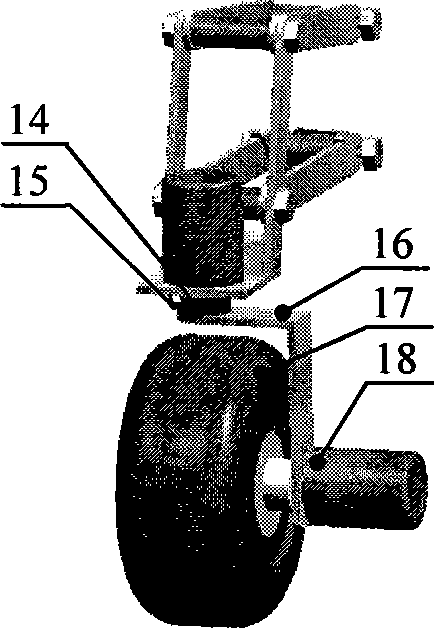
[0020] Such as figure 1 As shown, the present invention comprises: head 1, abdomen 2, flank 3 and tail 4 four parts, and its connection mode is: head 1 and abdomen 2 are hinged, left and right two flanks 3 are respectively hinged at abdomen 2, tail 4 and tail Belly 2 hinged. Among them, the head 1 includes: short crank plate 8, crank plate connecting cylinder 7, bolt 6, head torsion spring 5, long crank plate 9, connecting rod plate 10, connecting rod mounting block 11, steering motor mounting plate 13, steering Motor 12, steering sleeve 14, screw 15, L-shaped support plate 16, drive motor 18, wheel 17. Two short crank plates 8 clamp the crank plate connecting cylinder 7 at the round holes at both ends, one end forms a rotating pair with the head connection block of the abdomen through the bolt 6, and the other end forms a rotating pair with the two connecting rods 10 through the bolt 6 . Two long crank plates 9 clamp the crank plate connecting cylinder 7 at the round holes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More