

Walking type power line obstacle-crossing inspection robot along line
A technology for inspection robots and power lines, applied in overhead lines/cable equipment, manipulators, motor vehicles, etc., can solve problems such as leakage and power outages, aging wires, small faults turning into large-scale accidents, and achieve low risk factors Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and specific implementations.
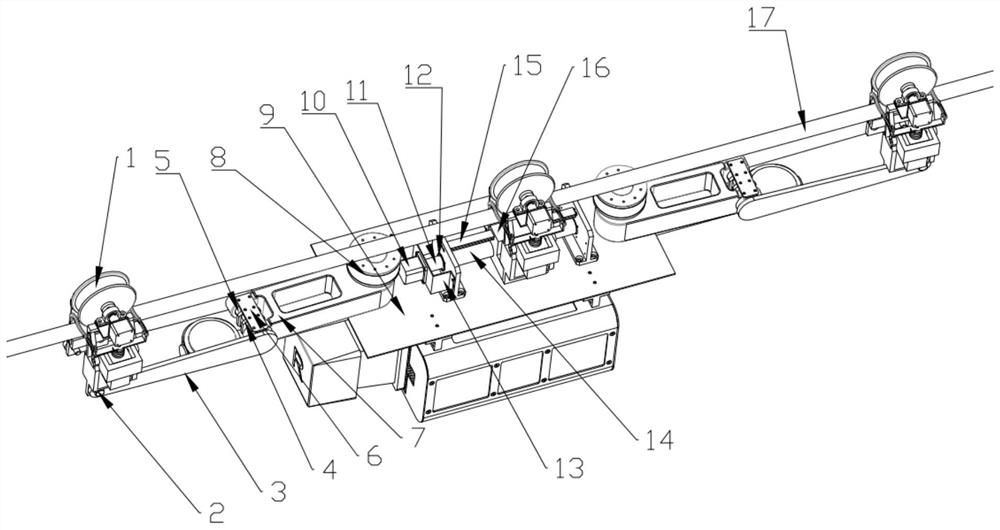
[0029] The present invention includes a control box 9, a mechanical arm, three traveling mechanisms 1 and a lead screw mechanism; the upper surface of the control box 9 is provided with a plate surface, the lead screw mechanism is fixedly installed on the plate surface, and a traveling mechanism 1 is installed on the lead screw mechanism , the two ends of the control box 9 along the direction of the transmission line 17 are connected and installed with a traveling mechanism 1 through a mechanical arm, and the three traveling mechanisms 1 are on the same horizontal plane and form a straight line.
[0030] The lead screw mechanism includes a lead screw motor 10, a lead screw coupling 11, a lead screw bearing seat 12, a lead screw motor fixing frame 13, a lead screw 14, a guide rail 15 and a lead screw nut seat 16; There are two screw bearing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More