

Proportionality-derivative control method with first compensation phase
A differential control, proportional technology, applied in the controller with specific characteristics, electric controller and other directions, can solve the problem of difficult to obtain the system step response without overshoot and so on
Inactive Publication Date: 2010-08-18
BEIHANG UNIV
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
This control method takes into account the requirements of response speed and overshoot to a certain extent, but it is difficult to obtain the condition that the system step response has no overshoot
Therefore, control engineers cannot directly apply this nonlinear control idea to design a step response non-overshoot controller
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples



Examples
Experimental program
Comparison scheme
Effect test
Embodiment approach ( 1
Embodiment approach ( 2
Embodiment approach ( 3
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
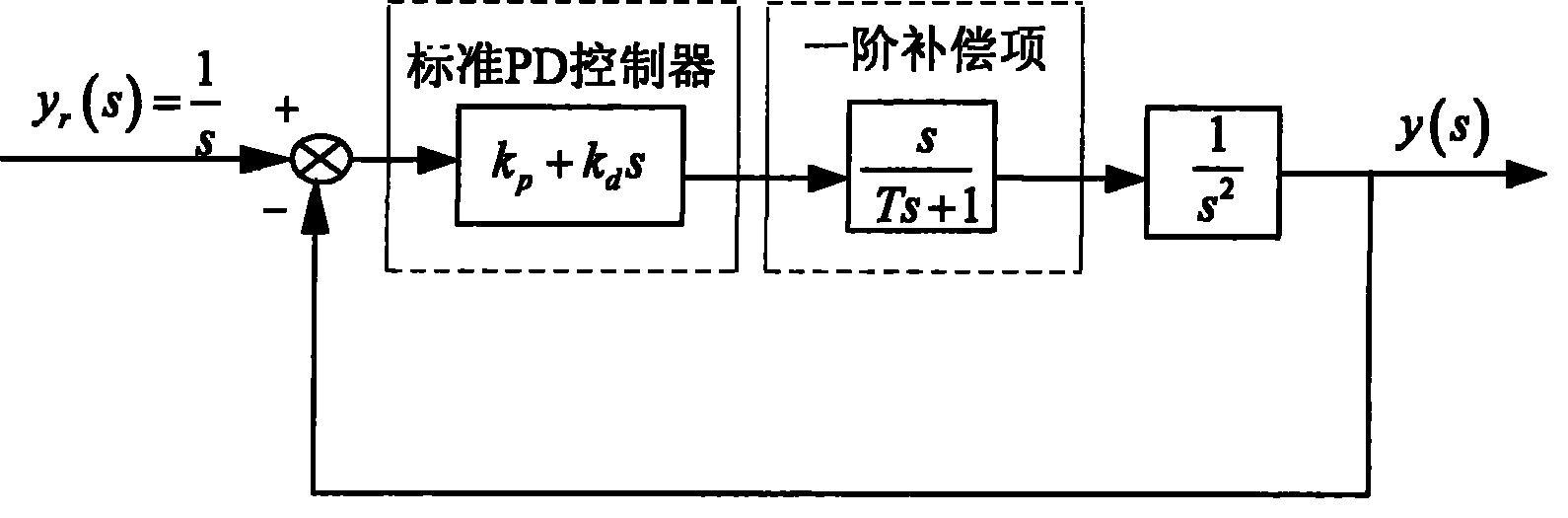
The invention relates to a proportional-differential control method with a first-order compensation term. The method comprises the following steps: the first step: design of the structure of a closed-loop control system: the closed-loop control system is an error unit negative feedback structure, and a control element comprises a standard PD controller and a first-order compensation term, wherein, an input signal of the standard PD controller is an error signal, and the first-order compensation term is positioned between the PD controller and a controlled object, the output signal of the PD controller is an input signal of the first-order compensation term, and the output signal of the first-order compensation term is the input signal of a double integration system; and the second step: design of time constant of the gain parameter and the compensation term of the controller: the control scheme introduced by 'the first step' is adopted to obtain a step response without overshoot, and the time constant of the gain parameter and the compensation term of the controller meets any one of four constraints. Compared with other controllers, the method can realize no overshoot of the step response of the closed-loop control system while controlling the double integration system.
Description
(1) Technical field The invention relates to a proportional-derivative (Proportional-Derivative, PD) control method with a first-order compensation item, in particular to a step response non-overshoot control method for a double-integral system, and belongs to the technical field of control engineering. (2) Background technology Many control problems in practice, such as feed control of high-speed machine tools, precise tracking of robot trajectories, control of attitude angle and angle of attack during take-off and landing of fixed-wing aircraft, etc. do not allow the step response of the system to have overshoot or large Overshoot (mainly limited by the size of the grazing angle). The double-integral model is an equivalent model or a simplified model of many controlled objects (also a low-order simplified model of many high-order systems), and it exists in large quantities in the inverted pendulum control system and the attitude control system of the aircraft (for example,...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G05B11/42
Inventor王新华朱波郑征蔡开元
OwnerBEIHANG UNIV