

Proportionality-derivative control method with first compensation phase
A differential control and proportional technology, applied to controllers with specific characteristics, electric controllers, etc., can solve problems such as difficult to obtain system step response without overshoot
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach ( 1
[0065] I Design the structure of the closed-loop control system
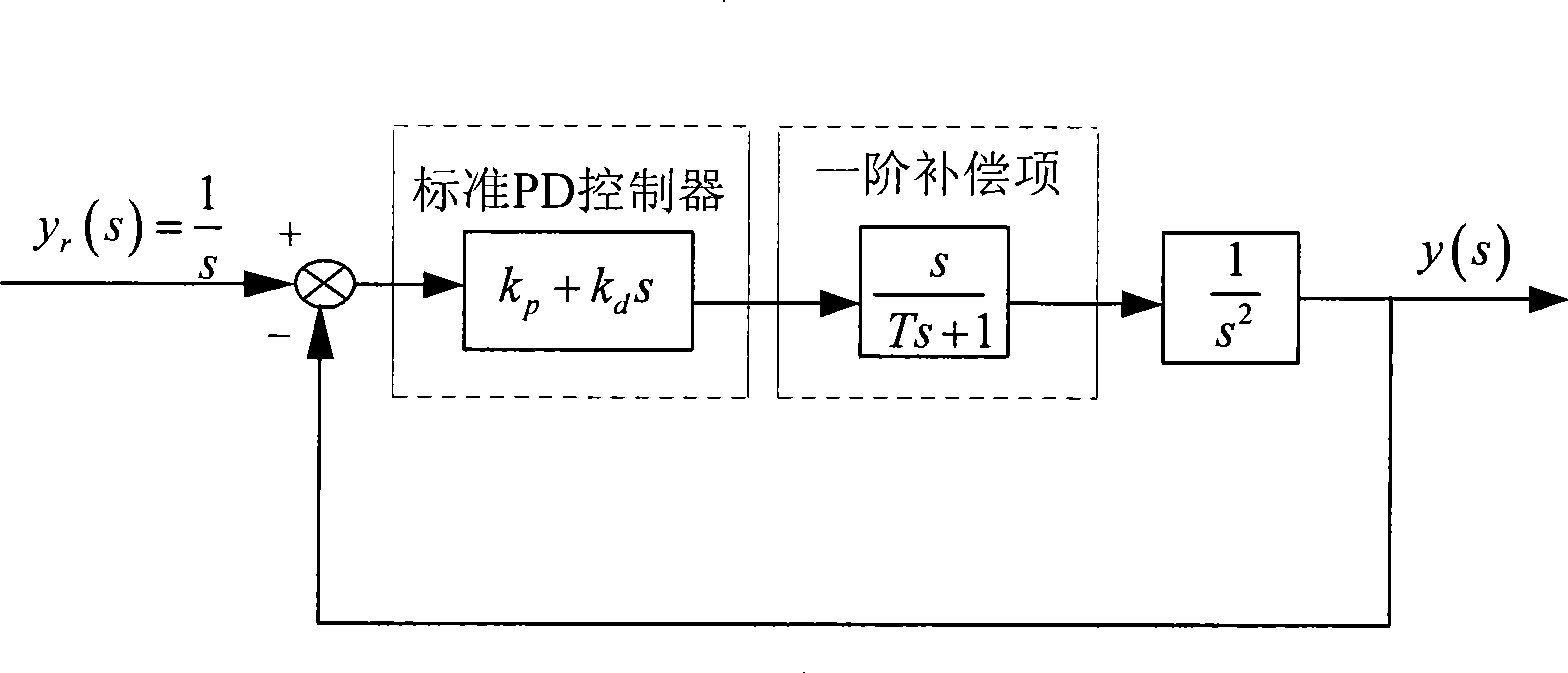
[0066] The output unit negative feedback control structure is adopted. Using the Simulink software package of the Matlab6.5 platform, the reference signal (unit step signal), the standard PD controller, the first-order compensation item and the double integral system are modeled, and their connections in the closed-loop control loop are shown in the appendix figure 1 shown.
[0067] The input signal of the standard PD controller is the error signal (obtained by subtracting the output signal from the reference signal); the first-order compensation item is between the standard PD controller and the controlled object, and the output signal of the standard PD controller is its input signal, its output signal is the input signal of the double integral system. The standard PD controller implemented by Simulink software has the input-output relationship described in formula (1) of this manual. Among them, the diffe...
Embodiment approach ( 2
[0072] I Design the structure of the closed-loop control system
[0073] This step is exactly the same as the corresponding step in Embodiment (1).
[0074] II Design of time constants for controller gain parameters and compensation terms
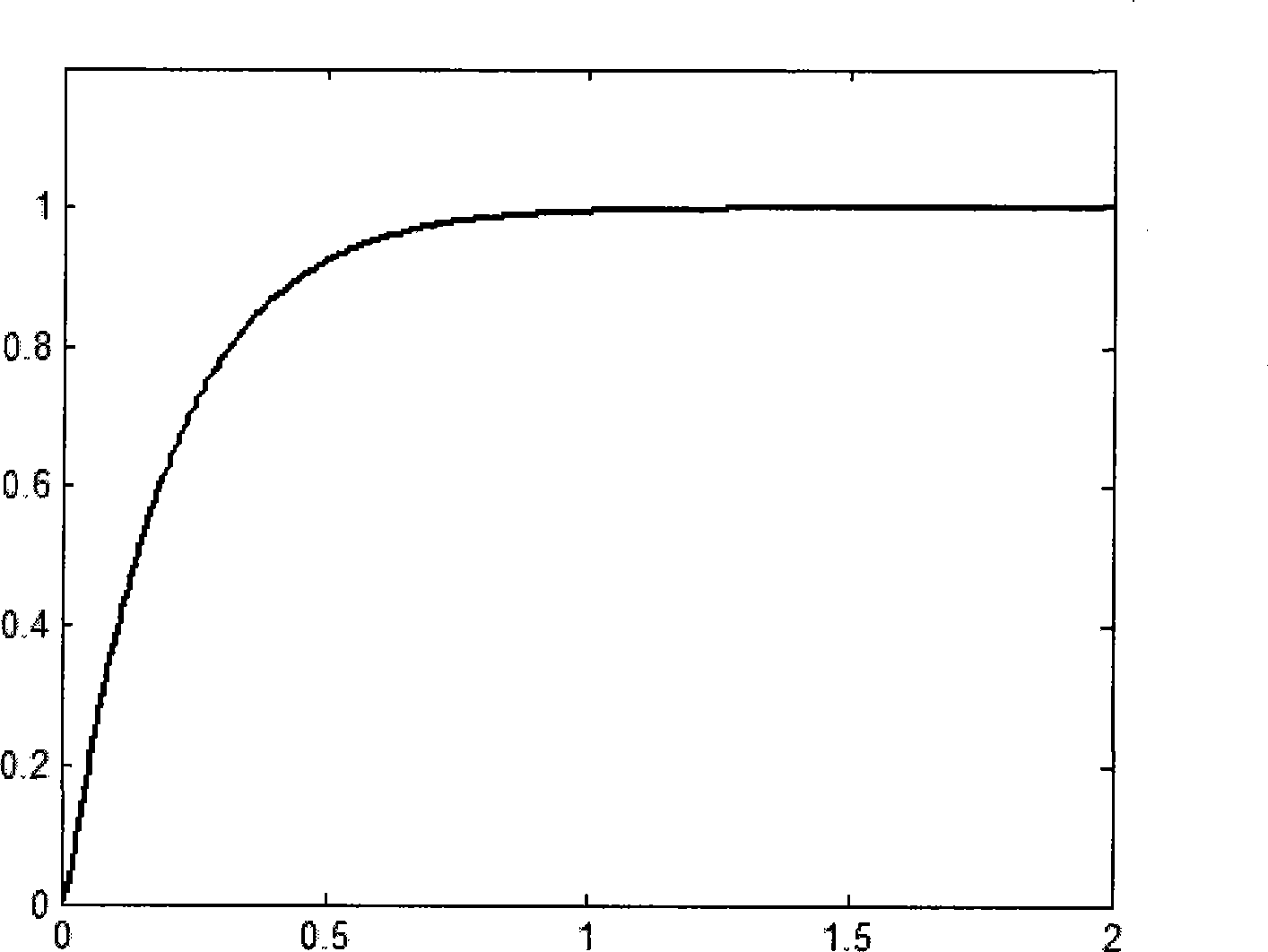
[0075] Design the time constant of the gain parameters of the PD controller and the first-order compensation item, and its specific value is k p =5,k d =0, T=0.01. This set of design parameters satisfies the second constraint given in the "second step" design step of the summary of the invention.
[0076] The simulation result of this embodiment is shown in the attached image 3 shown.
Embodiment approach ( 3
[0078] I Design the structure of the closed-loop control system
[0079] This step is exactly the same as the corresponding step in Embodiment (1).
[0080] II Design of time constants for controller gain parameters and compensation terms
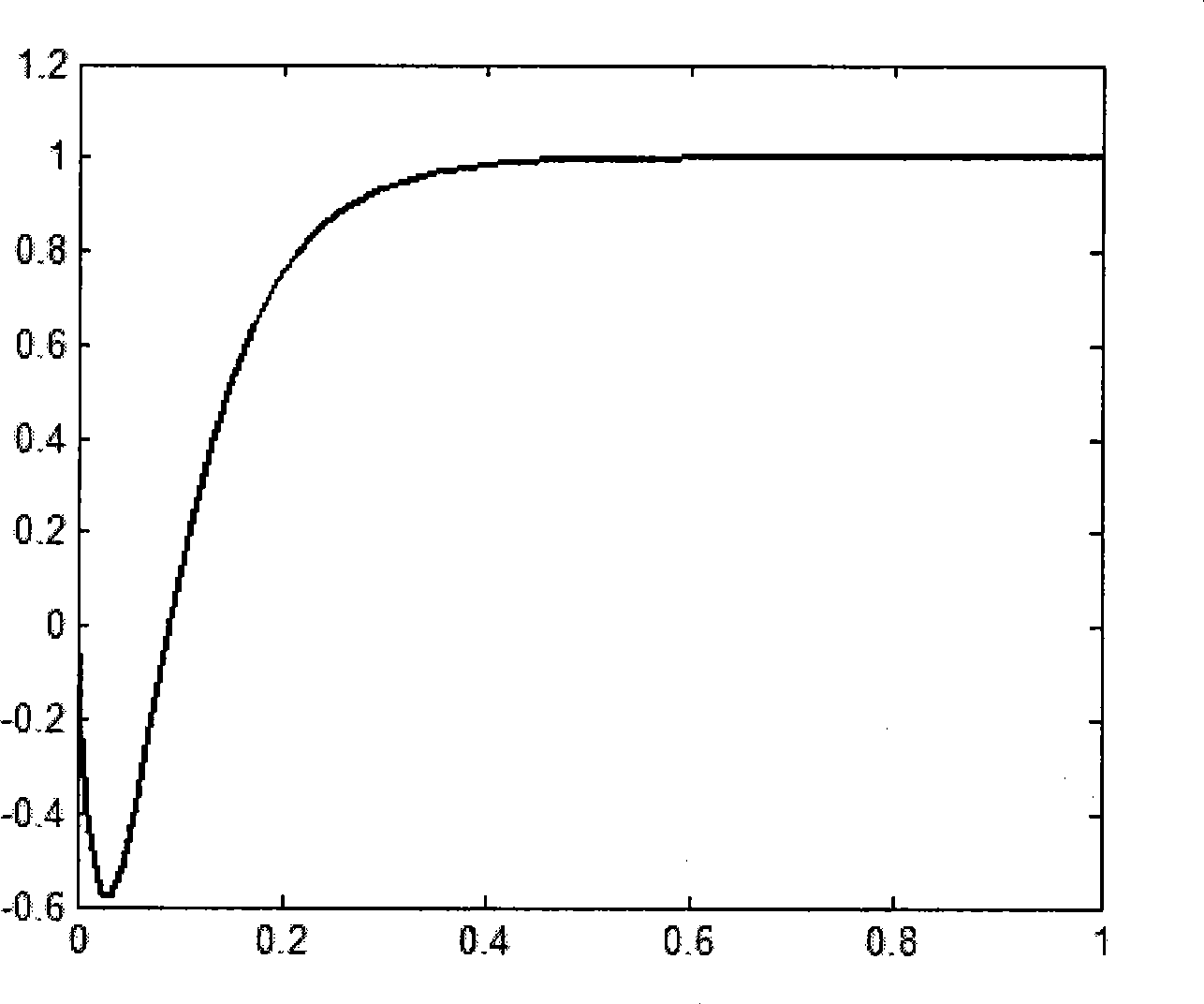
[0081] Design the time constant of the gain parameters of the PD controller and the first-order compensation item, and its specific value is k p =40,k d =0.5, T=0.01. This set of design parameters satisfies the third constraint given in the "second step" design step of the summary of the invention.
[0082] The simulation result of this embodiment is shown in the attached Figure 4 shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More