

A New Variable Structure pi Controller
A controller and variable structure technology, applied in the field of control, can solve problems such as step response overshoot, difficulty in setting control parameters, poor tracking performance, etc., and achieve the effects of easy industrial implementation, improved tracking performance, and strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
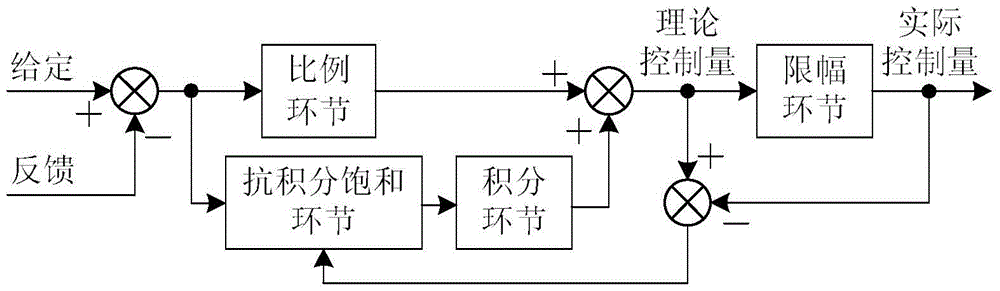
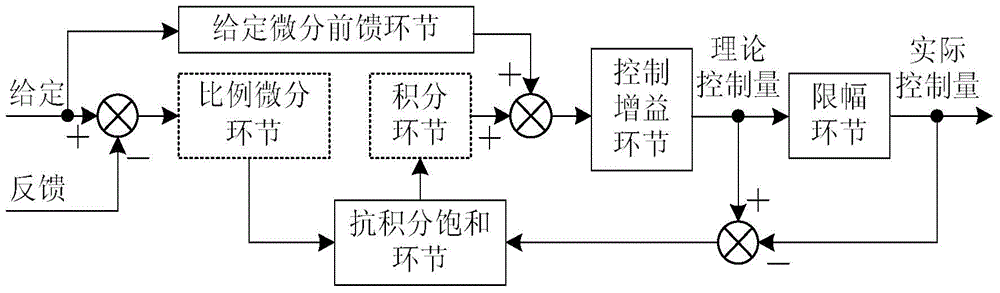
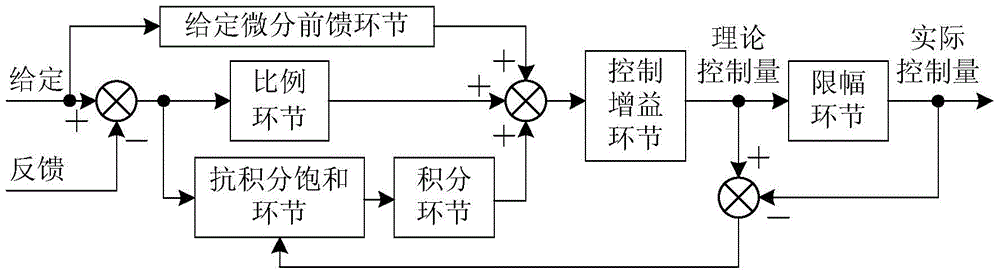
[0024] like figure 2 The system structure block diagram of the present invention shown is a novel variable structure PI controller, including a given differential feed-forward link, a proportional differential link, an integral link, an anti-integral saturation link, a control gain link, a limiting link, an adder, a first A subtractor and a second subtractor, the positive input terminal of the first subtractor inputs a given signal, the negative input terminal of the first subtractor inputs a feedback signal, and the output terminal of the first subtractor is connected to the input terminal of the proportional differential link , the input end of the given differential feedforward link inputs the aforementioned given signal, the output end of the given differential feedforward link is connected to the first input end of the adder, and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More