

Self-determination gas escape type wall climbing robot vibration adsorption foot section
A wall-climbing robot and foot technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of increased volume and power consumption, and achieve the effects of low power consumption, stable adsorption and degassing, and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical scheme of the present invention will be further described below in conjunction with the accompanying drawings.
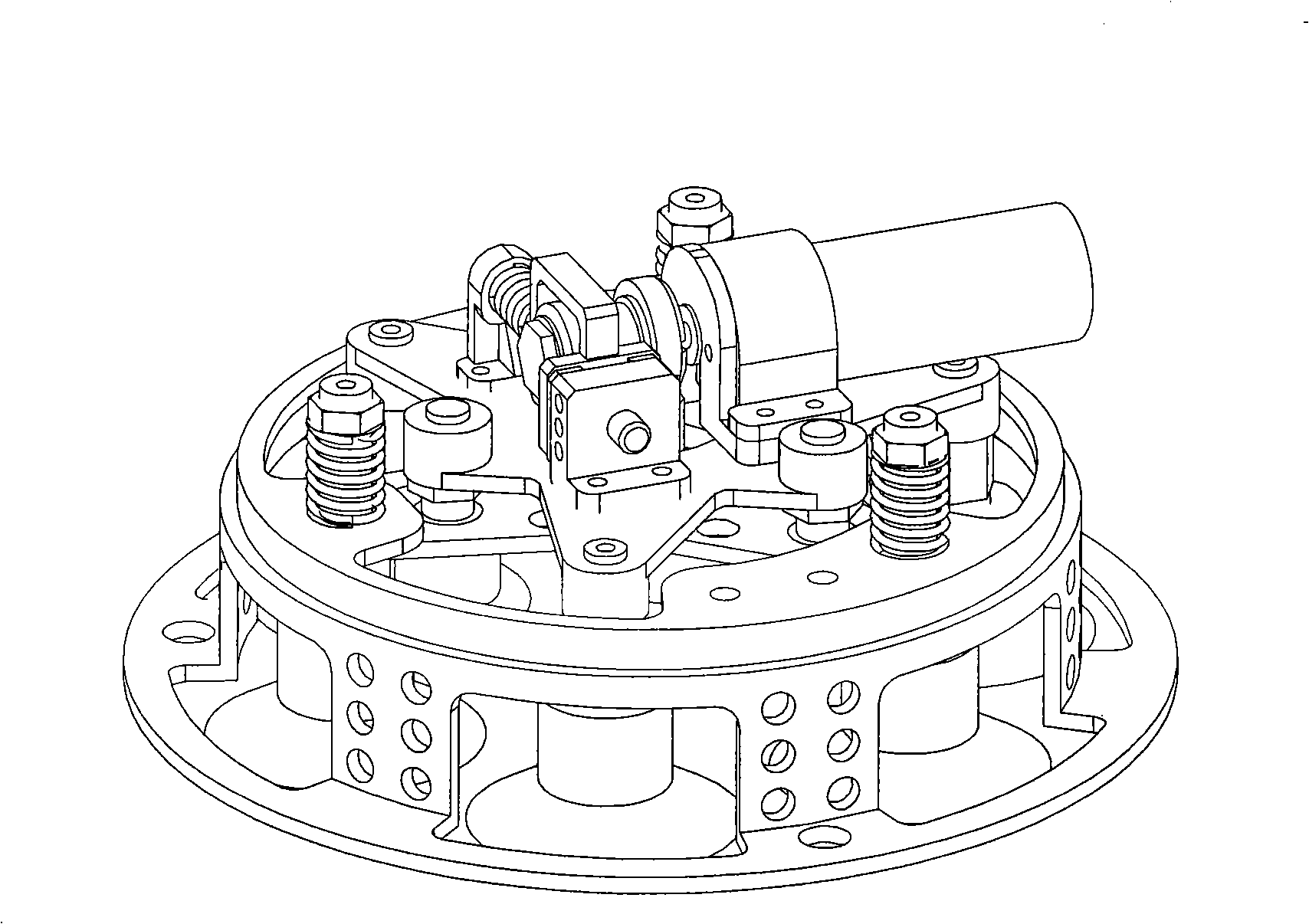
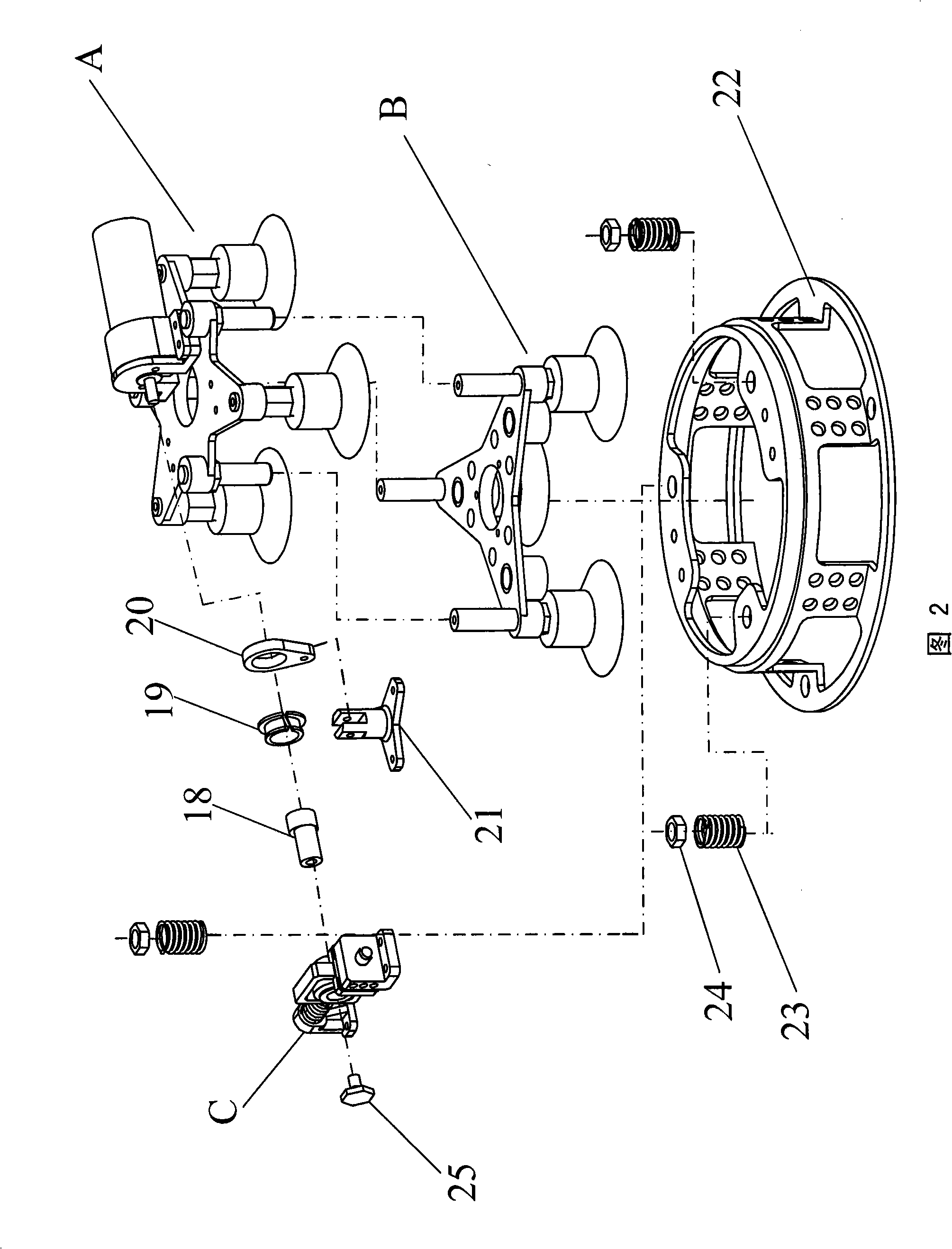
[0045] Such as figure 1 , 2, 6, 10, 11, 12, 13, the present invention consists of upper plate assembly A, lower plate assembly B, air release mechanism C, transmission cam 18, clamp bearing 19, cam sleeve 20, upper and lower plate connectors 21, a stabilizing ring 22, a firm spring 23, a fixing nut 24, and a deflation mechanism fixing bolt 25 are formed.
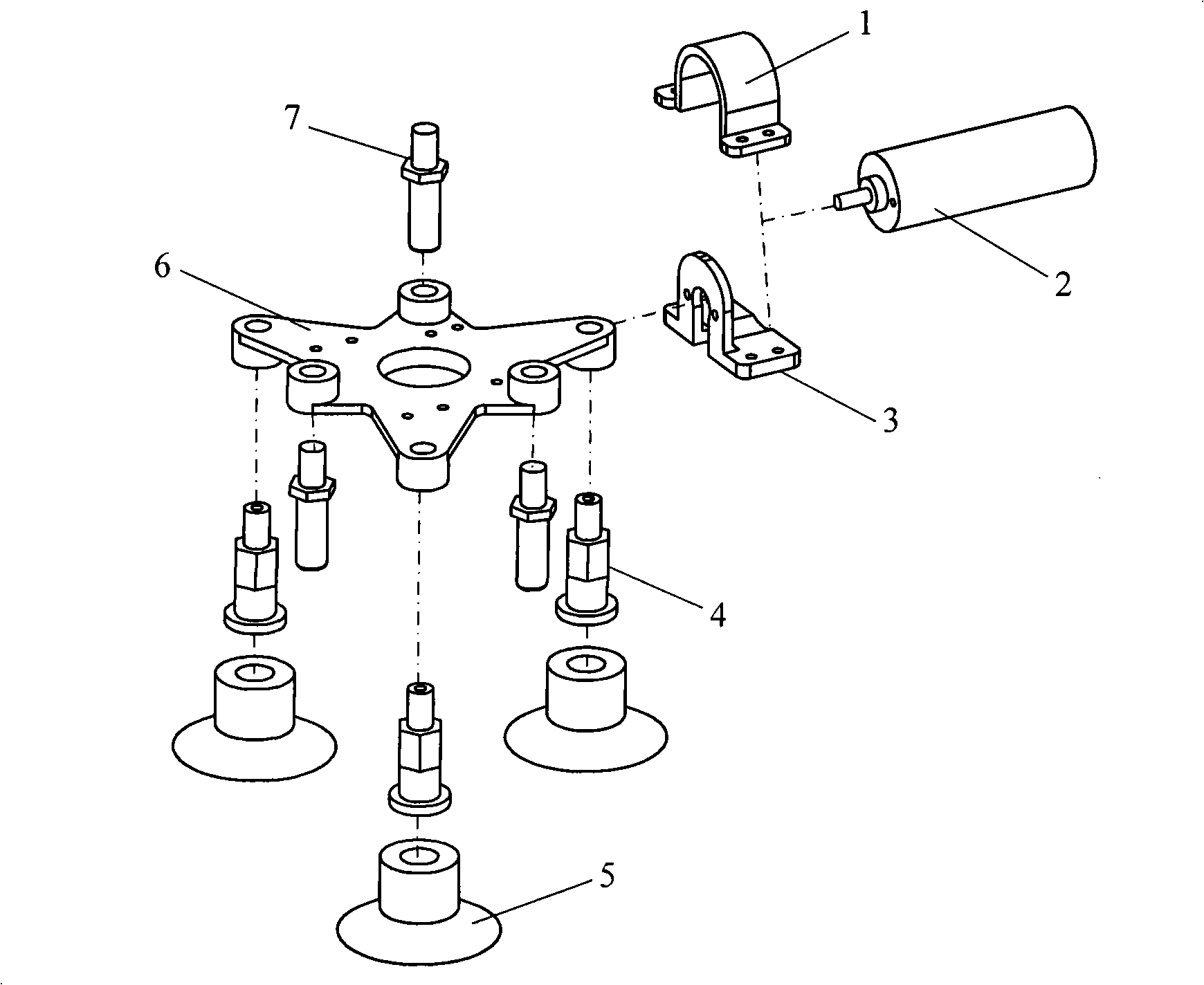
[0046] Such as image 3 , 7 , 8, and 14, the upper plate assembly A includes a motor fixing sleeve 1, a motor 2, a motor mounting plate 3, an upper plate suction cup joint 4, a vacuum suction cup 5, an upper plate 6, and a guide rod 7. The vacuum suction cup 5 is installed on the head of the upper plate suction cup joint 4, and the upper plate suction cup joint 4 is installed in the threaded hole on the upper plate 6 by the thread at its tail. The motor 2 is installed on the end surface of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More