

Forward looking self-adapting speed controlling method for high-speed processing tiny line segment
An adaptive, line-segment technology, applied in the direction of digital control, electrical program control, etc., can solve the problems that the interpolation error at the corner cannot be guaranteed, the large flexible impact of the machine tool, and the single-axis acceleration capacity is overloaded.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
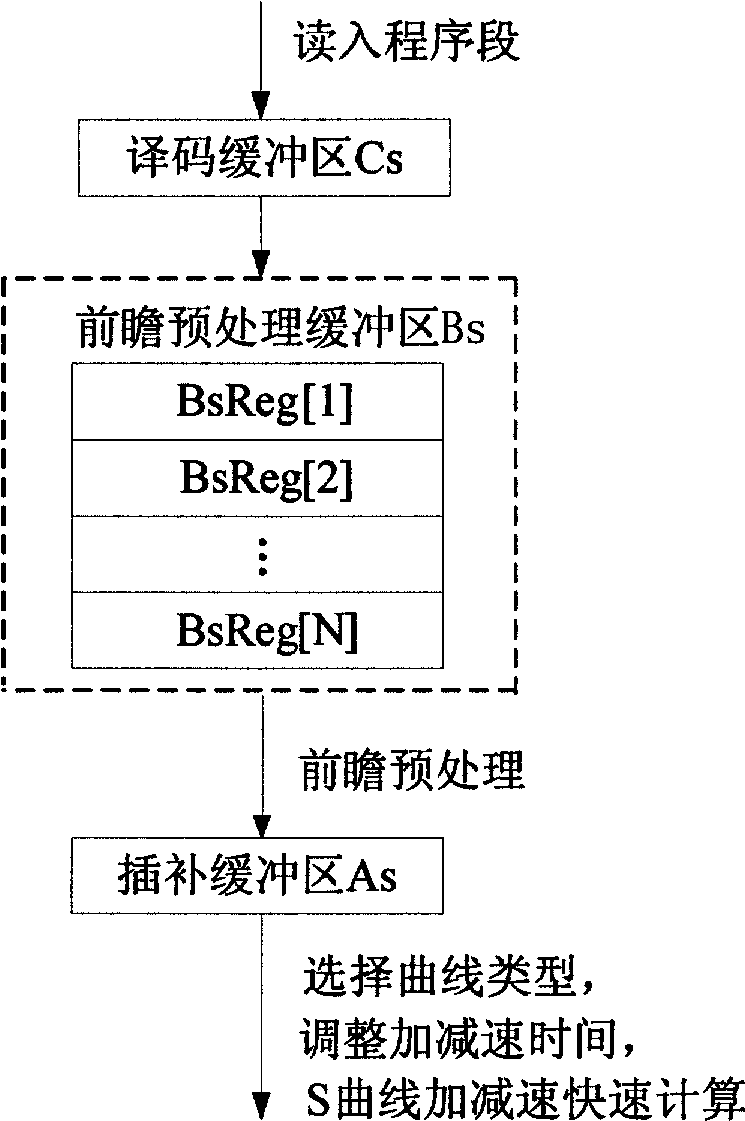
[0044] The present invention provides a forward-looking self-adaptive speed control method for high-speed processing of small line segments, which performs multi-layer pre-reading and decoding processing on the numerical control system, and automatically adjusts the acceleration and deceleration time constant and acceleration and deceleration according to the transition of multiple segments and the length of the line segment Curve type.
[0045] The forward-looking adaptive speed control method for micro line segment processing provided by the present invention includes: pre-calculation of the final speed of the section to be processed; an adaptive selection strategy of acceleration and deceleration time constants and acceleration and deceleration curve types; and fast calculation of S-curve acceleration and deceleration.
[0046] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0047] see figure 1 As shown, in order to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More