Modular reconfigurable worm type wall climbing robot
A wall-climbing robot, a modular technology, applied in the field of wall-climbing robots, can solve the problems of low degree of freedom, weak movement flexibility, poor obstacle crossing ability, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
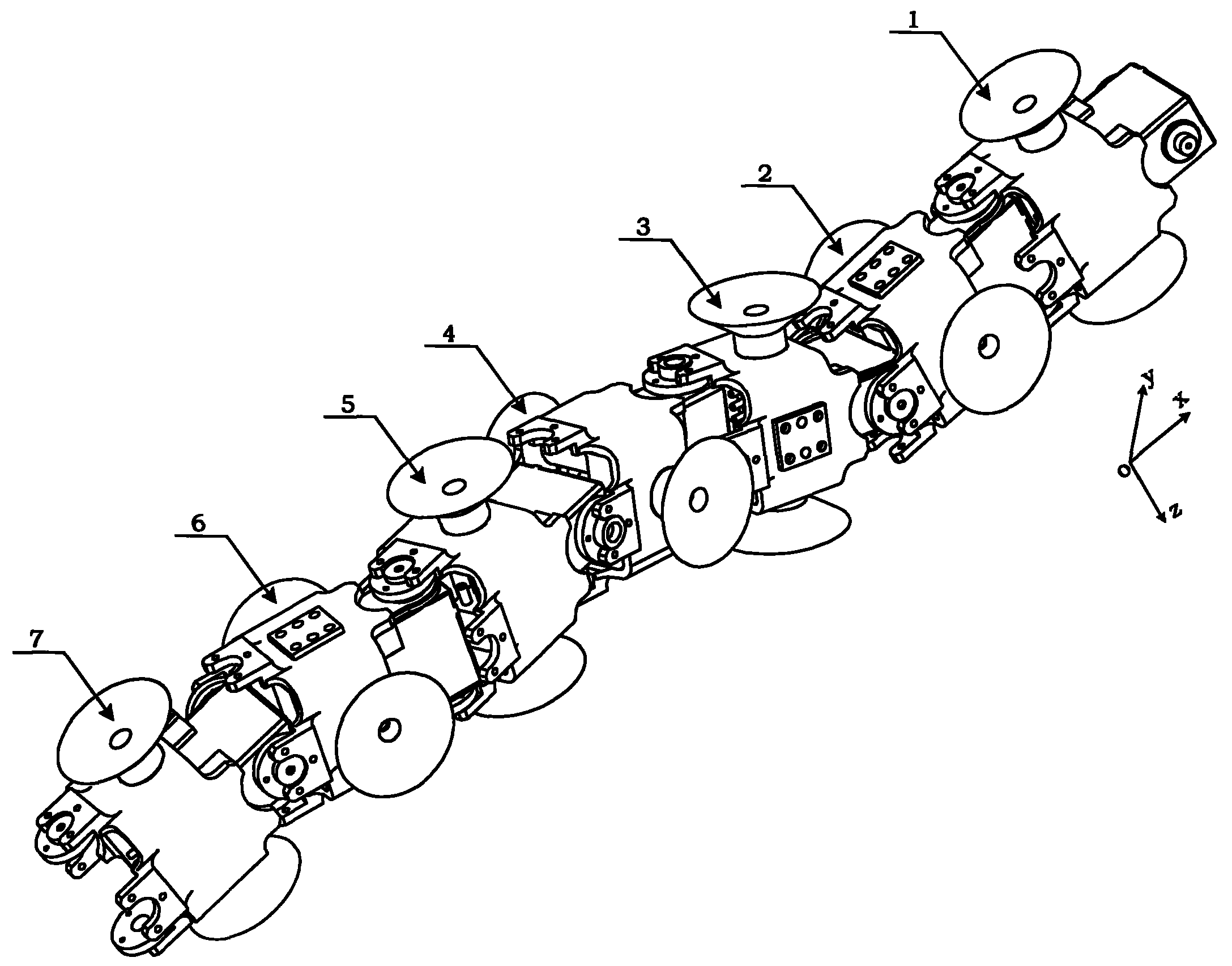
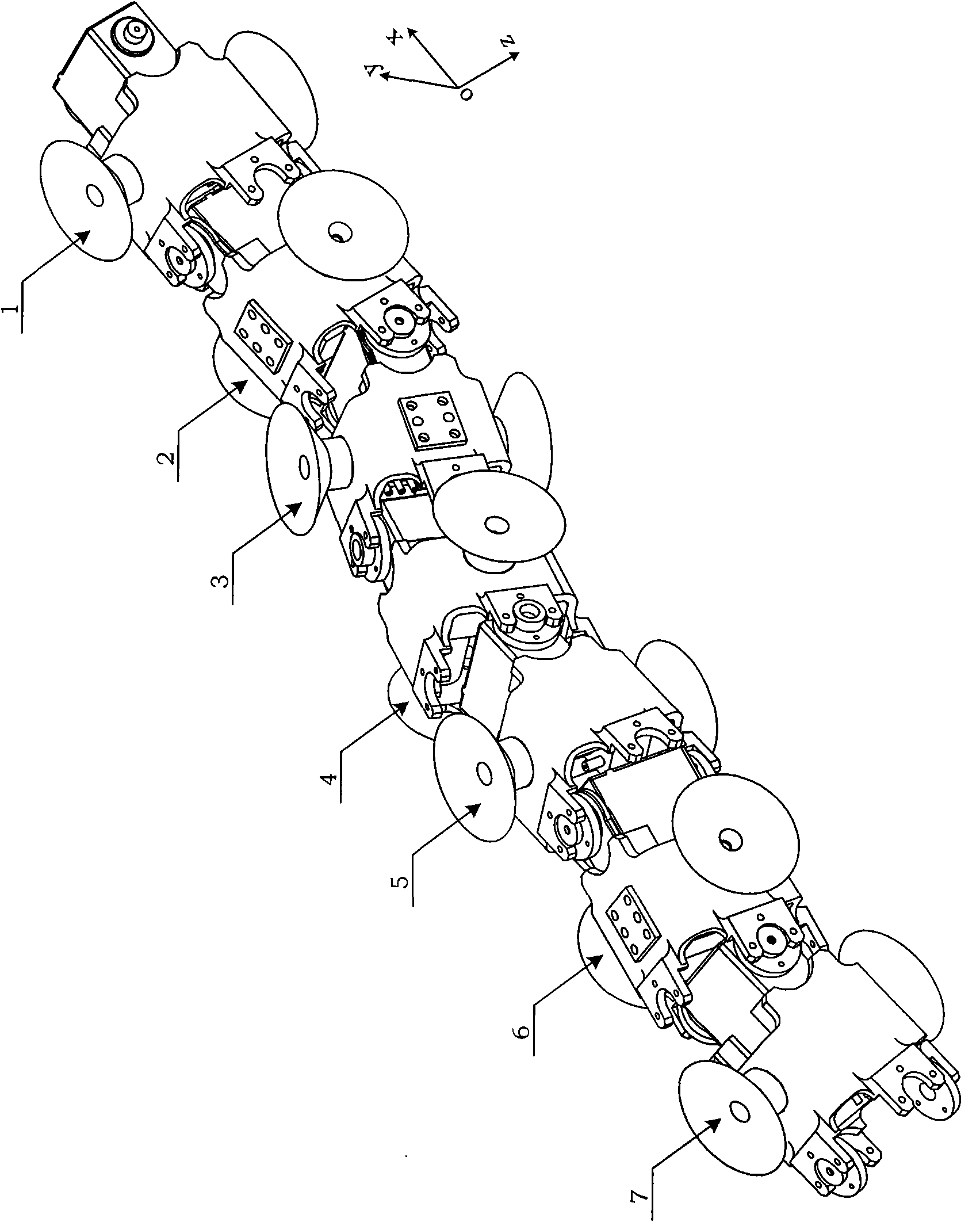
[0067] The present invention will be further described in detail below in conjunction with the accompanying drawings.
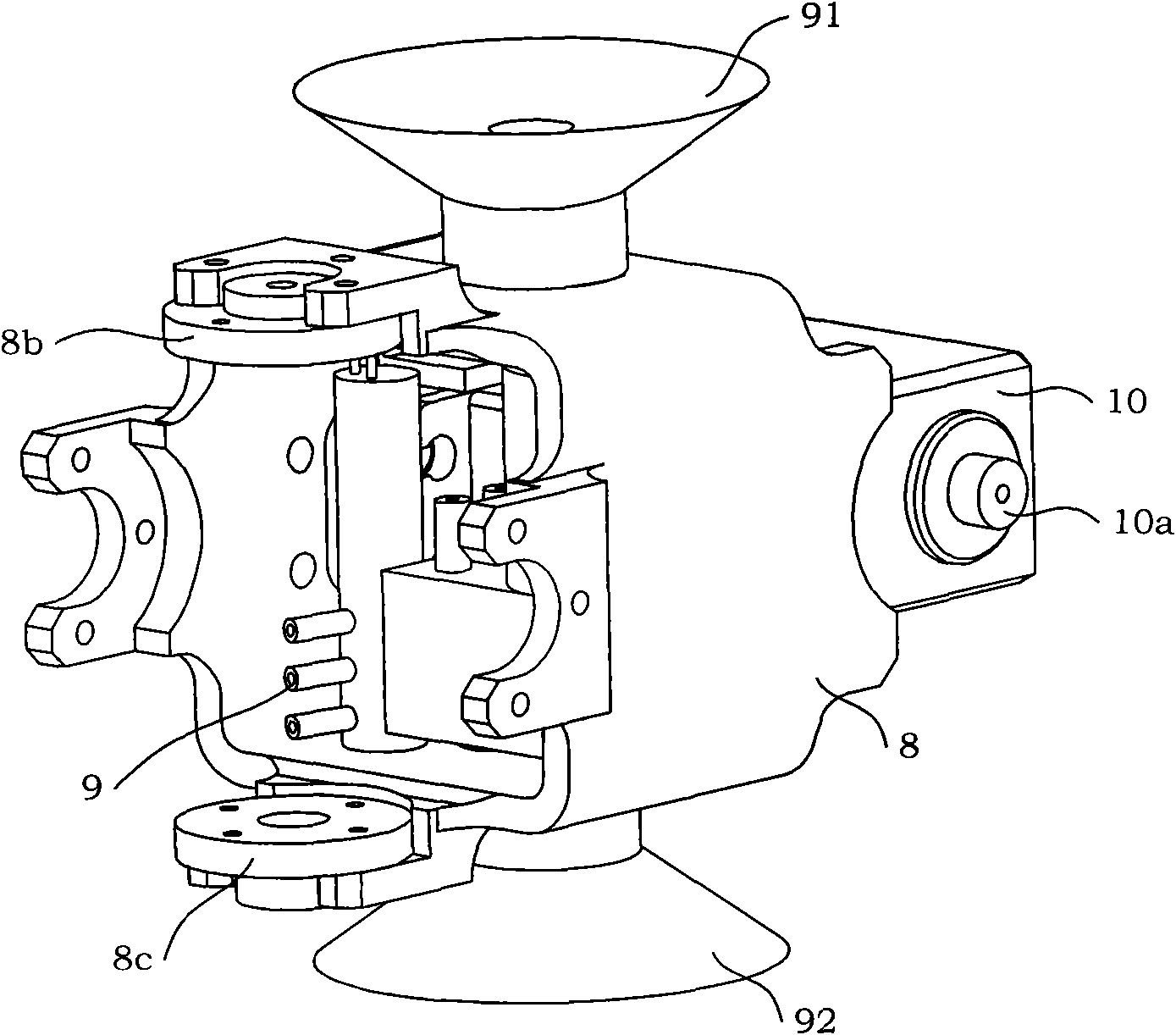
[0068] The present invention is a modular reconfigurable worm-type wall-climbing robot. Two adjacent adsorption joints of the wall-climbing robot are orthogonally connected. If the orthogonal connection of the worm-type wall-climbing robot composed of seven adsorption joints is (See Figure 1): The driving shaft 10a of the steering gear 10 on the adsorption joint 1 of A is placed along the x-axis direction, the driving shaft of the steering gear on the B adsorption joint 2 is placed along the y-axis direction, The driving shaft of the steering gear is placed along the direction of the x-axis, the driving shaft of the steering gear on the D adsorption joint 4 is placed along the y-axis direction, the driving shaft of the steering gear on the E adsorption joint 5 is placed along the x-axis direction, and the driving shaft of the steering gear on the F adsorption ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More