

Modular reconfigurable crawler-type wall climbing robot
A wall-climbing robot and crawler-type technology, applied in the field of wall-climbing robots, can solve problems such as weak movement flexibility, poor obstacle-surmounting ability, and low degree of freedom, so as to enhance movement flexibility, reduce processing costs, and facilitate reconfiguration Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] The present invention will be further described in detail below in conjunction with the accompanying drawings.
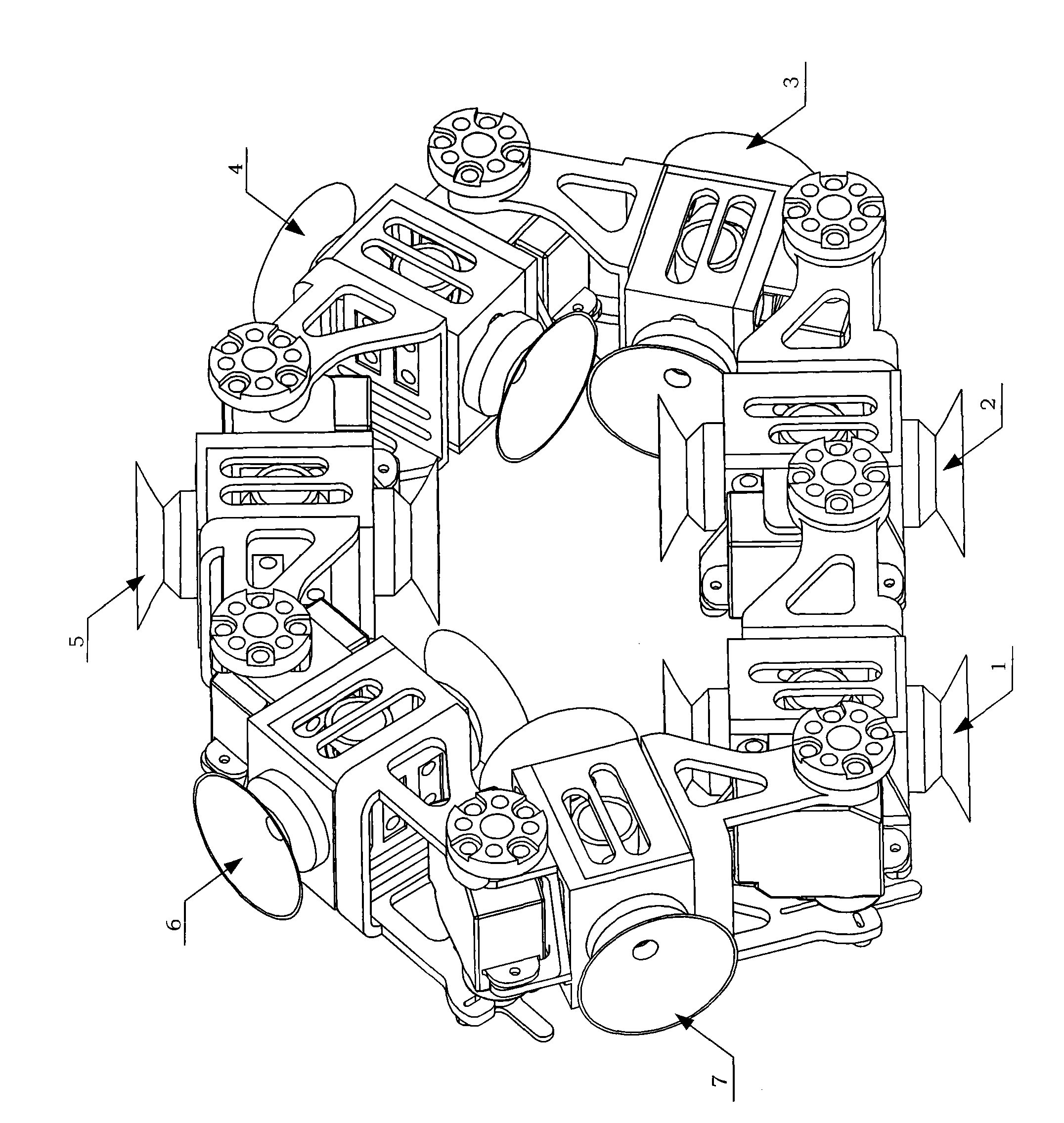
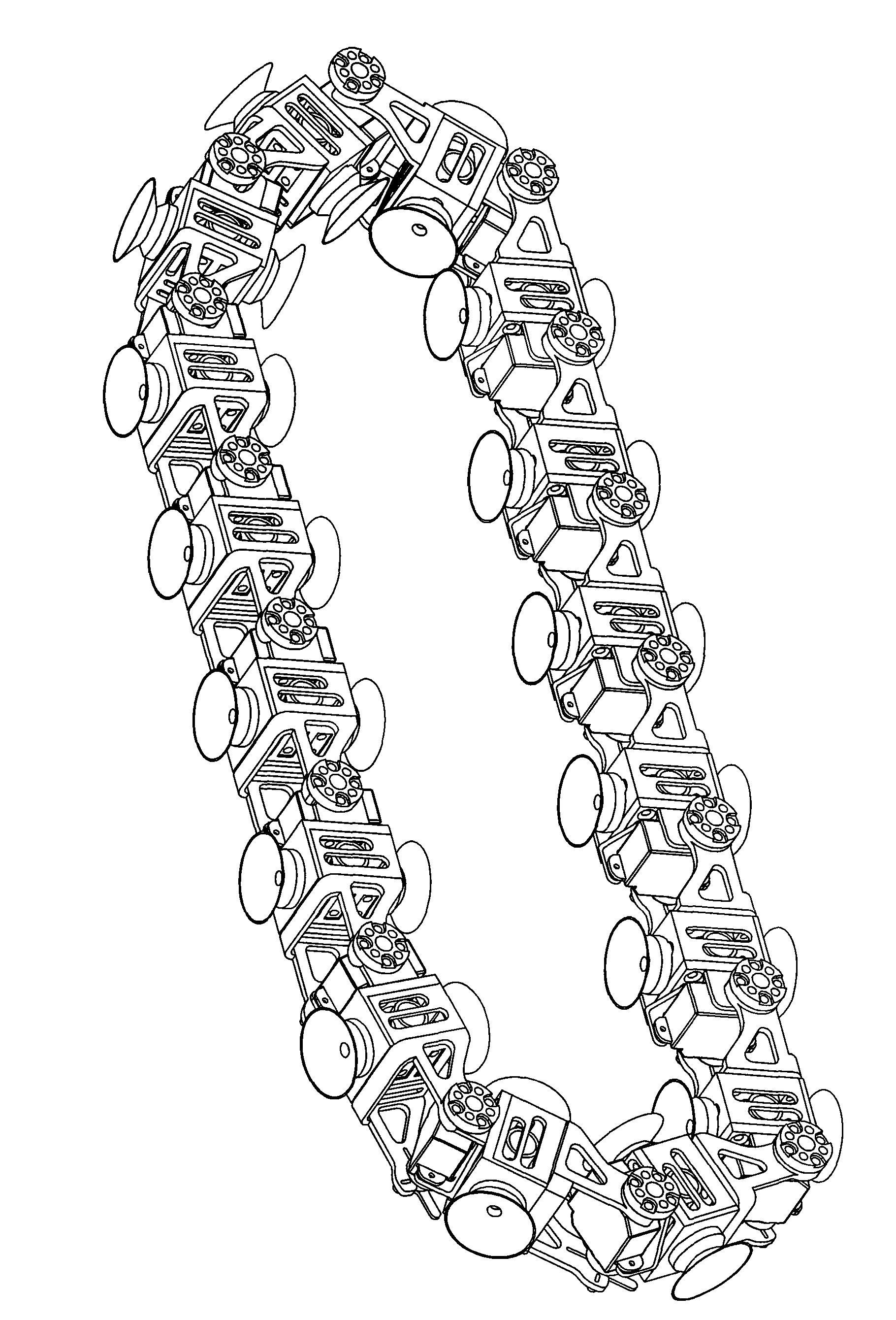
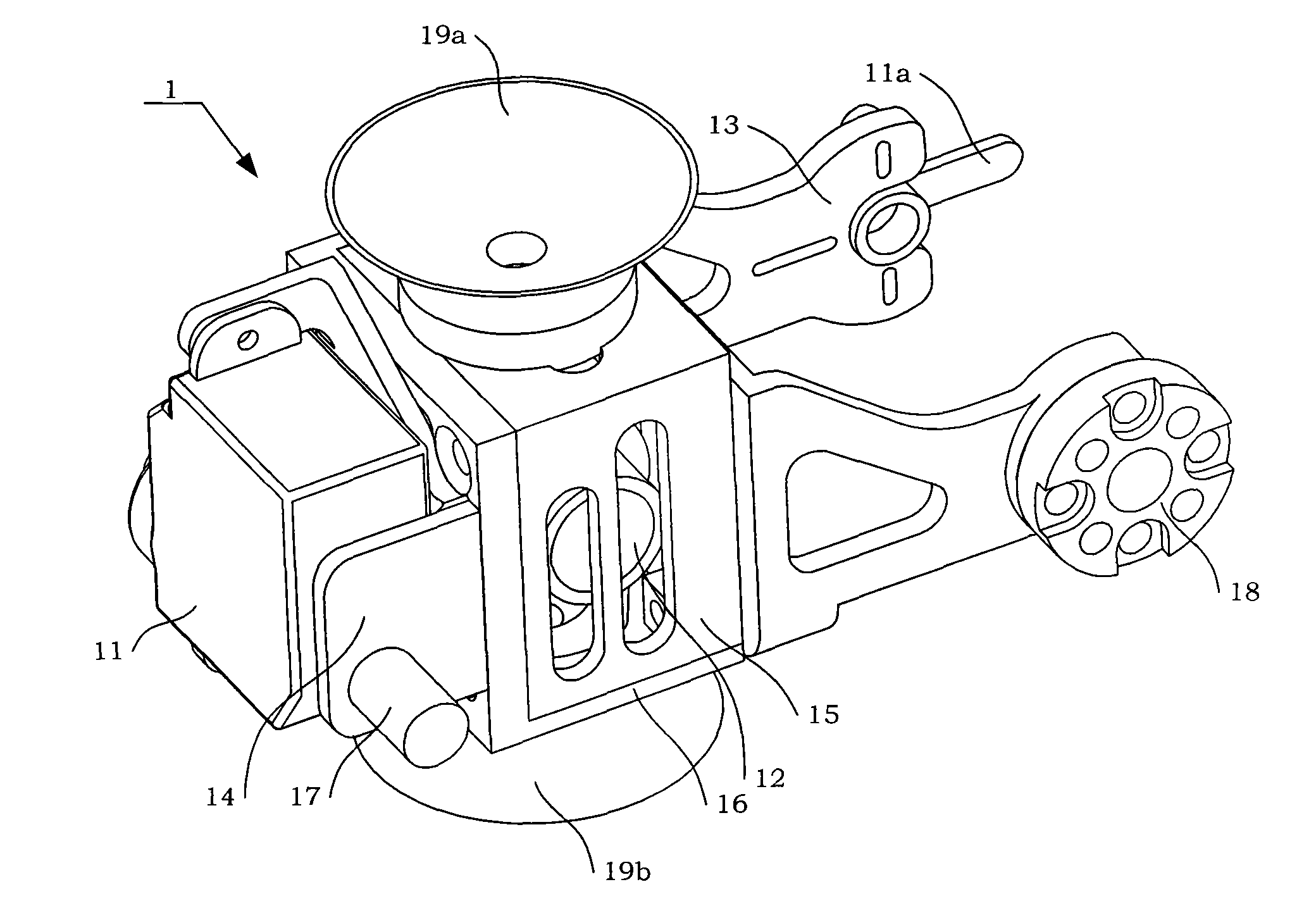
[0077] see figure 1 , image 3 As shown, the present invention is a modularized reconfigurable crawler-type wall-climbing robot. The shaft hole of machine output shaft and shaft cooperates to form crawler type wall-climbing robot. The steering gear output shaft of the steering gear is engaged on the tiller, the steering gear is installed on the bracket, and the tiller is installed on the U-shaped frame; the assembly of the shaft and the bushing and the assembly of the steering gear output shaft and the tiller can realize The former adsorption joint and the latter adsorption joint rotate relative to the output shaft and shaft of the steering gear. This axle is installed on the support, and this axle sleeve is installed on the U-shaped frame. In the present invention, each adsorption joint is designed with an independent skeleton, which is composed of A she...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More