

Three freedom degree motion simulator of pneumatic hybrid mechanism
A technology of motion simulator and hybrid mechanism, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of large working space, small working space, unsuitable for working space application fields, etc., and achieve simple mechanism, convenient control, and good flexibility Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
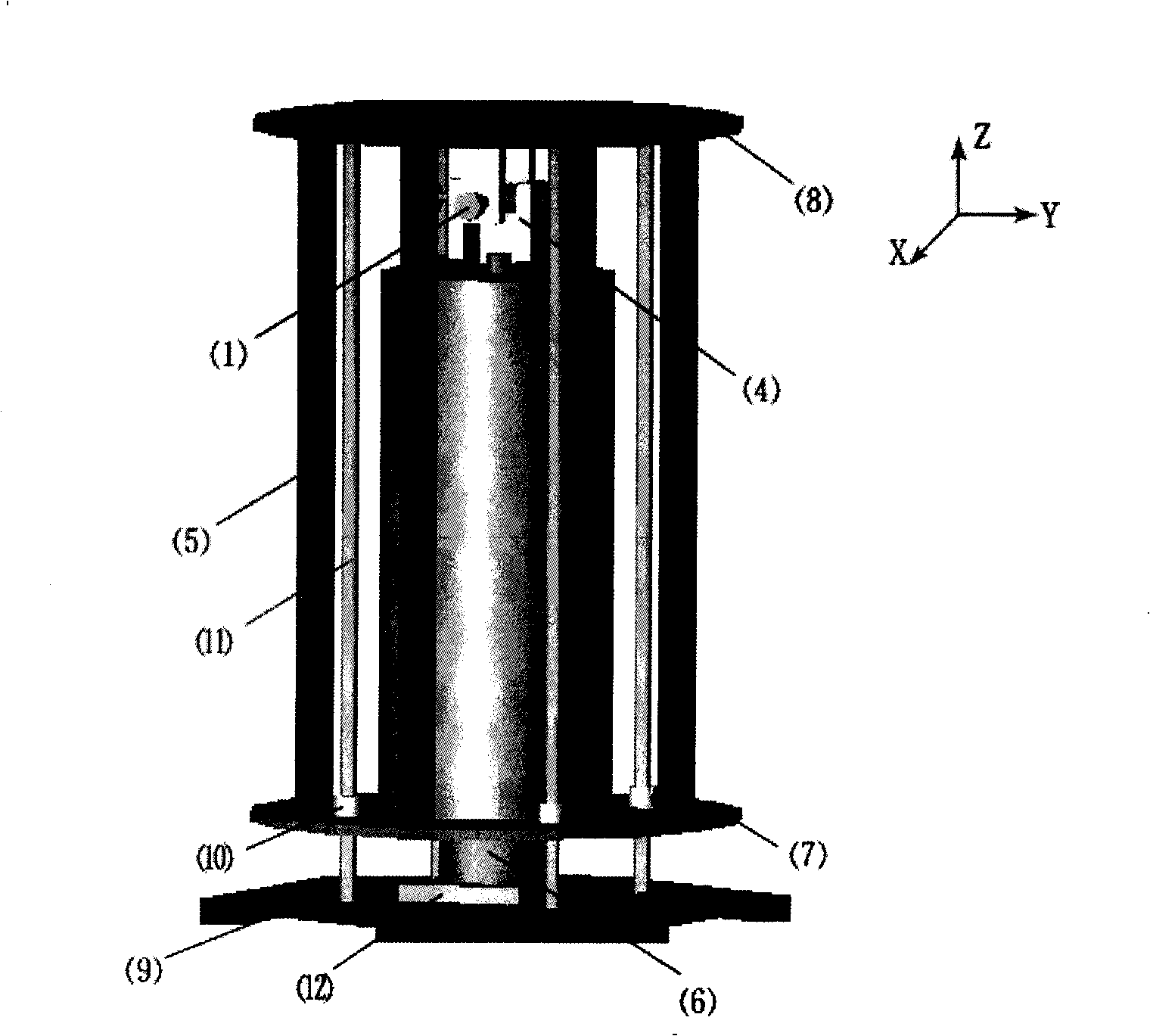
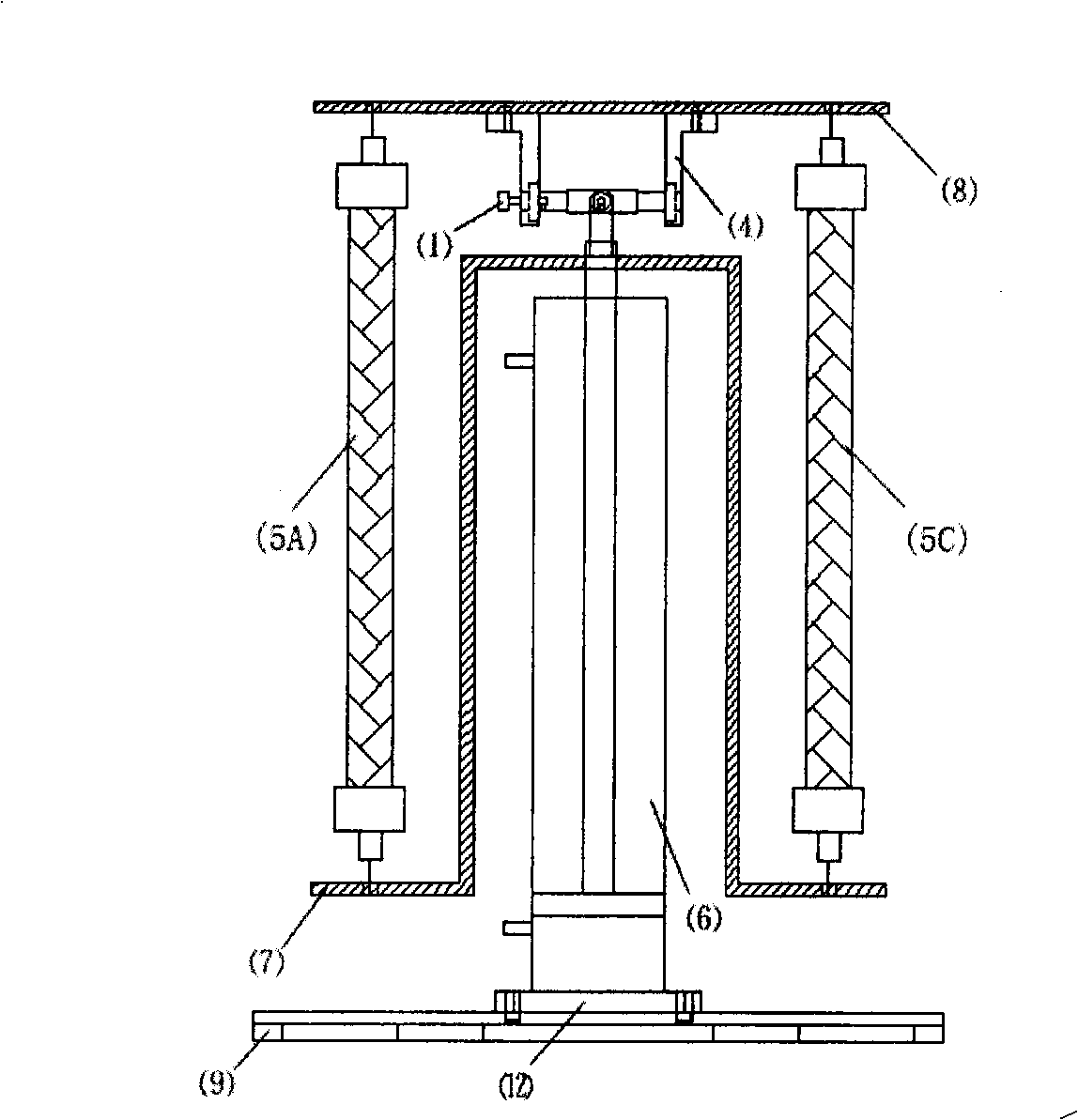
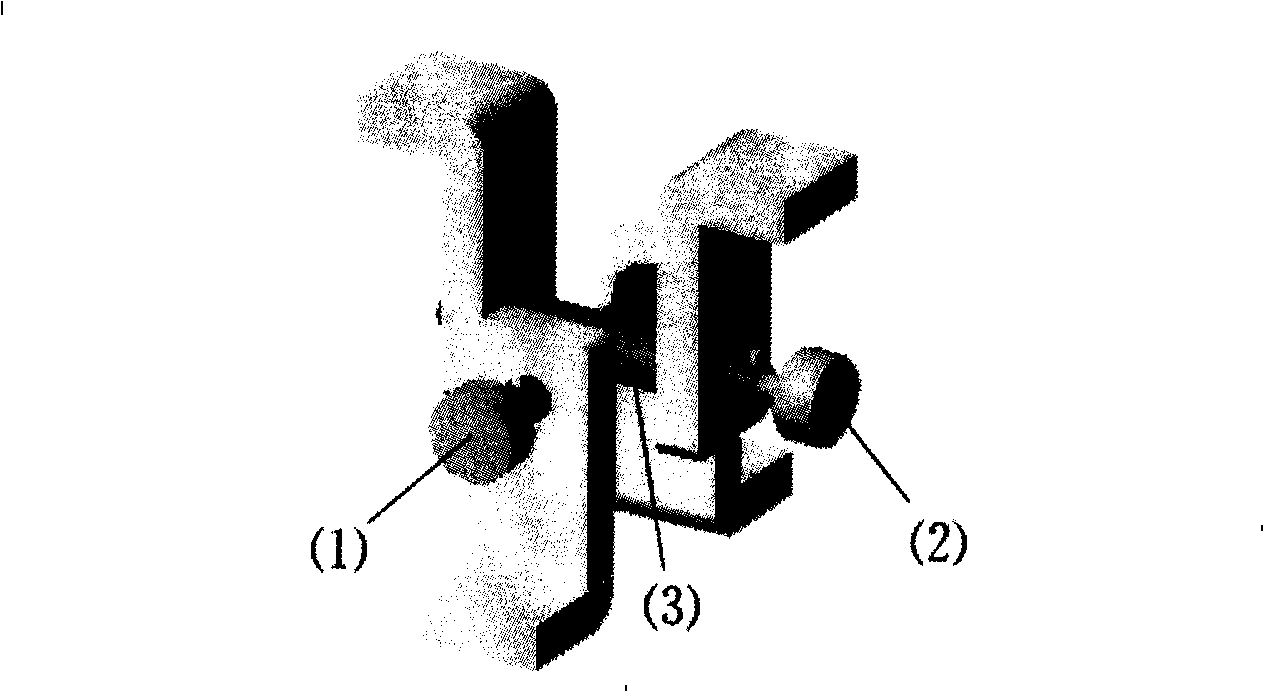
[0030] The three-degree-of-freedom motion simulator of the pneumatic hybrid mechanism of the present invention includes a two-degree-of-freedom space parallel mechanism driven by a pneumatic artificial muscle, a series mechanism driven by a cylinder with a measurable stroke, and a pneumatic control mechanism; wherein, the space parallel The mechanism is composed of a first angle sensor, a second angle sensor, a cross shaft, a Hooke hinge, a pneumatic artificial muscle, an upper platform and a lower platform; The two degrees of freedom of rotation of the parallel mechanism; the length of the cross axis of the Hooke hinge is 110mm, the radius is 20mm, the length of the four L-shaped blocks of the Hooke hinge is 45mm, and the height is 95mm; the radius of the upper platform is 250mm, and the radius of the lower platform is 250mm. The lower platform sleeve ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More