

Equipment and method for controlling two-parallel axis synchronous movement servo system
A technology for controlling equipment and servo systems, used in digital control, electrical program control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific implementation of the technical solution of the control device and control method of the two parallel axes synchronous movement servo system of the present invention is described below.
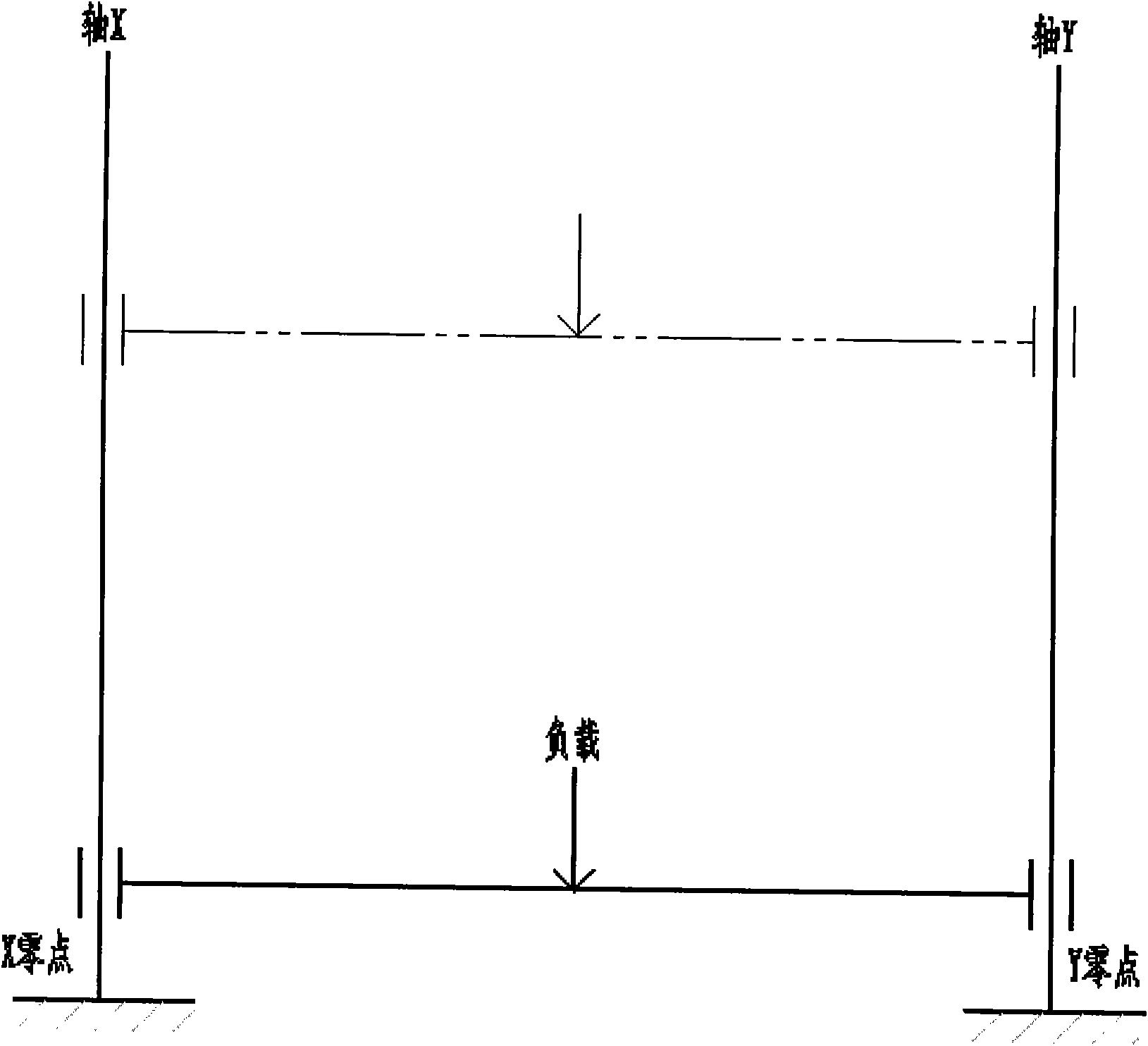
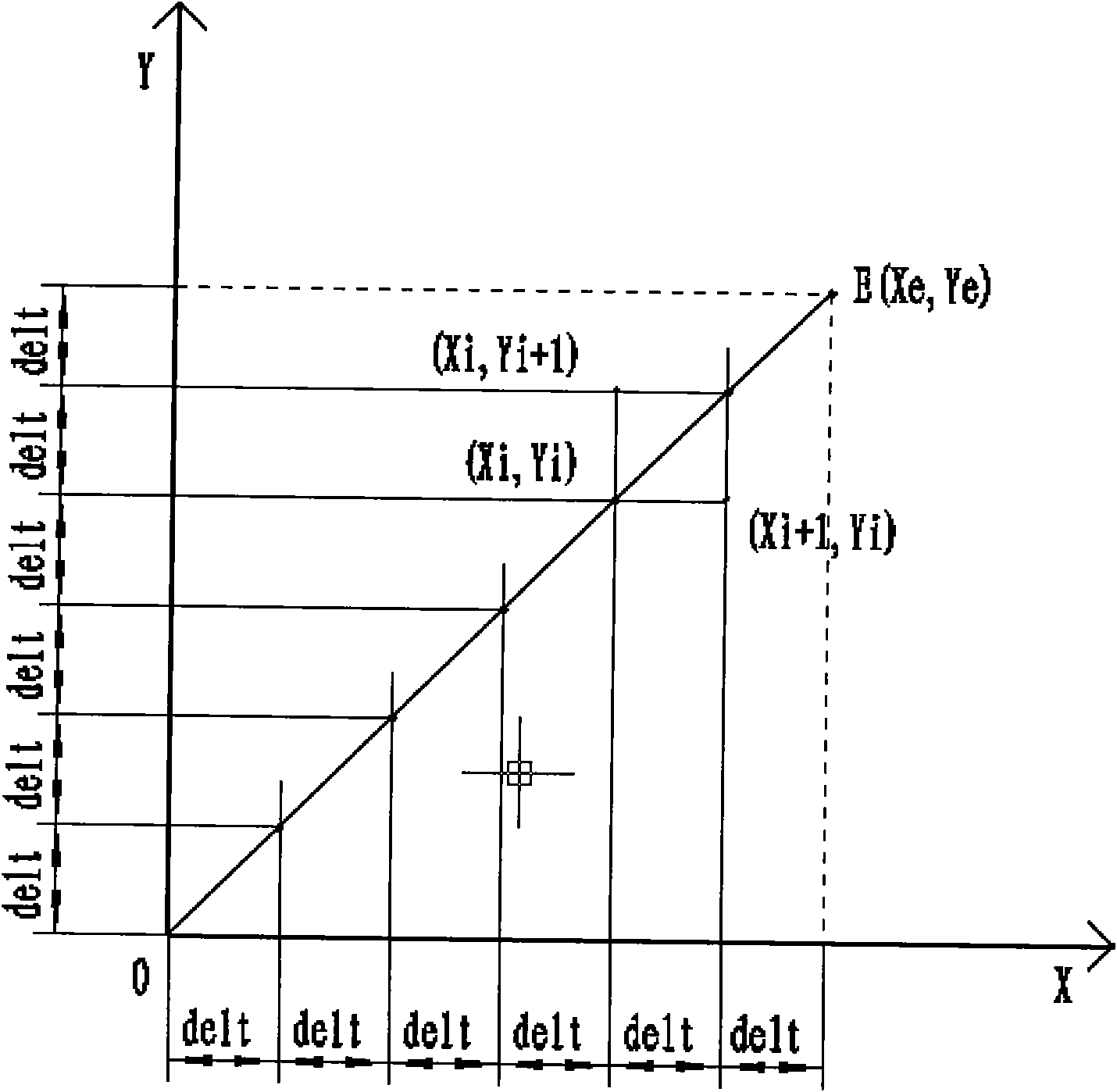
[0034] Take the initial points of the two servo objects as the origin O of the X-Y coordinate plane, take the displacement of the first of the two objects as the X-axis, and the other one as the Y-axis, and interpolate the slope of 1 from the zero point on the XOY plane straight line. The projections of the straight line on the two axes are equal and equal to the target position of the synchronous movement, realizing the position synchronization of the two axes; using the direct search method of numerical control interpolation, the displacement of the two axes is equal in the same interpolation cycle, realizing the speed synchronization of the two axes , including the following steps:
[0035] (1) The positions of the two axes when the control starts are respectively used...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More