

Metamorphic tool hand for abdominal cavity minimal invasive surgery robot
A surgical robot and minimally invasive surgery technology, applied in surgical robots, surgical instruments, operations, etc., can solve the problems of no institutional design medical equipment, no product development and use, etc., to achieve a simple structure, convenient exit from the abdominal cavity, and improved flexibility. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The metamorphic tool hand for the abdominal minimally invasive surgery robot of the present invention will be further described in detail below in conjunction with the embodiments.
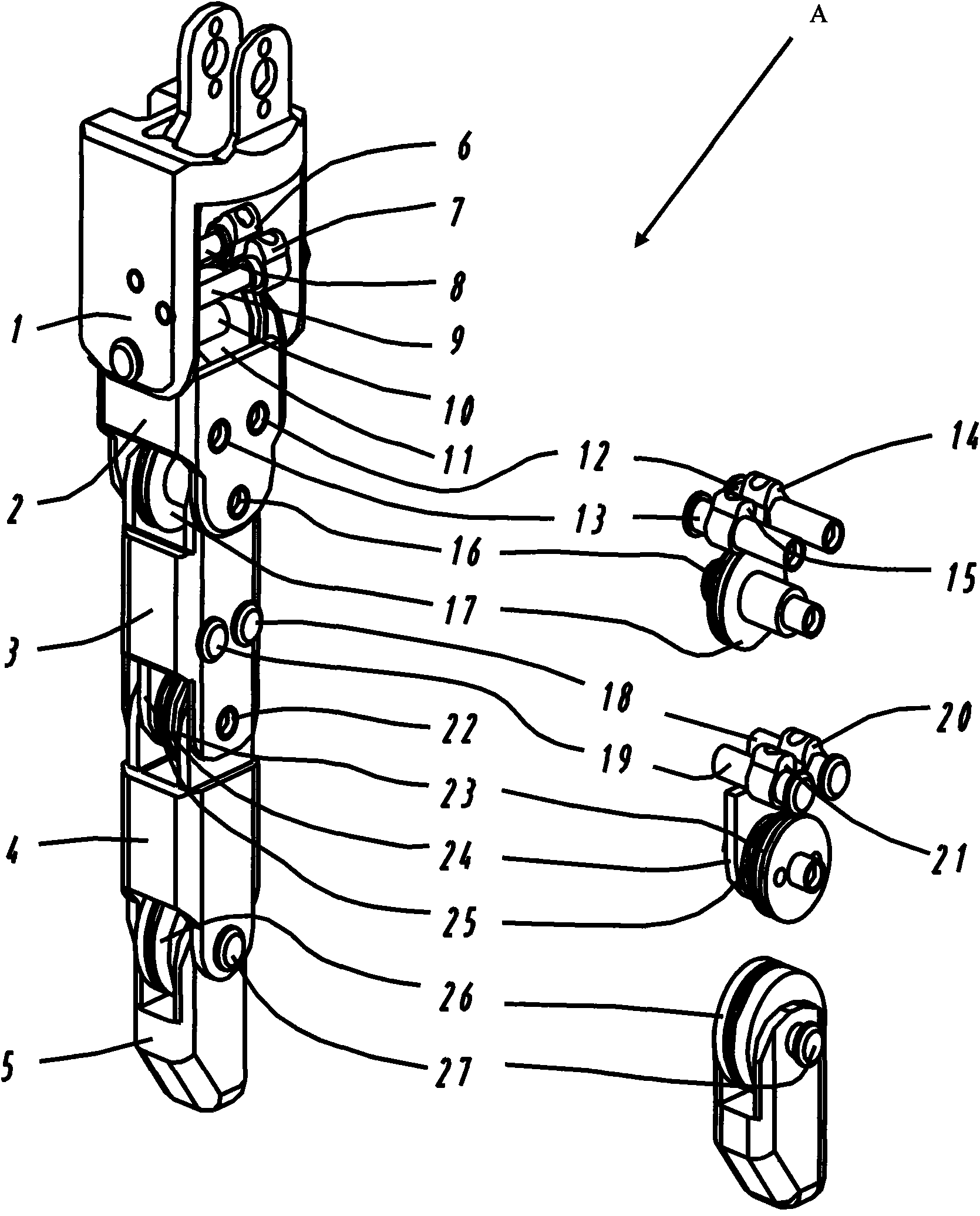
[0028] The main components and details of the hand of the metamorphic tool for the minimally invasive abdominal surgery robot of the present invention are as follows:
[0029] 1-palm body I 34-middle finger body IV 67-runner wheel 100-pin shaft
[0030] 2-index finger body I 35-guide wheel 68-secondary base rod 101-pin shaft
[0031] 3-index finger body II 36-guide wheel 69-thumb body I 102-sleeve
[0032] 4-index finger body III 37-pin shaft 70-pipe sleeve 103-pipe sleeve
[0033] 5-index finger body IV 38-pin shaft 71-finger body 2 104-guide block
[0034] 6-pipe sleeve 39-guide wheel 72-pipe sleeve 105-push rod
[0035] 7-pipe sleeve 40-pin shaft 73-pipe sleeve 106-connecting rod I
[0036] 8-pin shaft 41-guide wheel 74-thumb body III 107-pin shaft
[0037] 9-pin shaft 42-pin shaft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More