

Finger allodynia device based on tabletop
A finger and human hand technology, which is applied in the field of desktop-based finger touch devices, can solve problems such as easy fatigue of human hands, affect human hand force perception, and unfavorable human intuitive feeling, etc., and achieve the effect of low overall cost, simple and compact structure, and natural operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Further description will be given below in conjunction with the accompanying drawings.
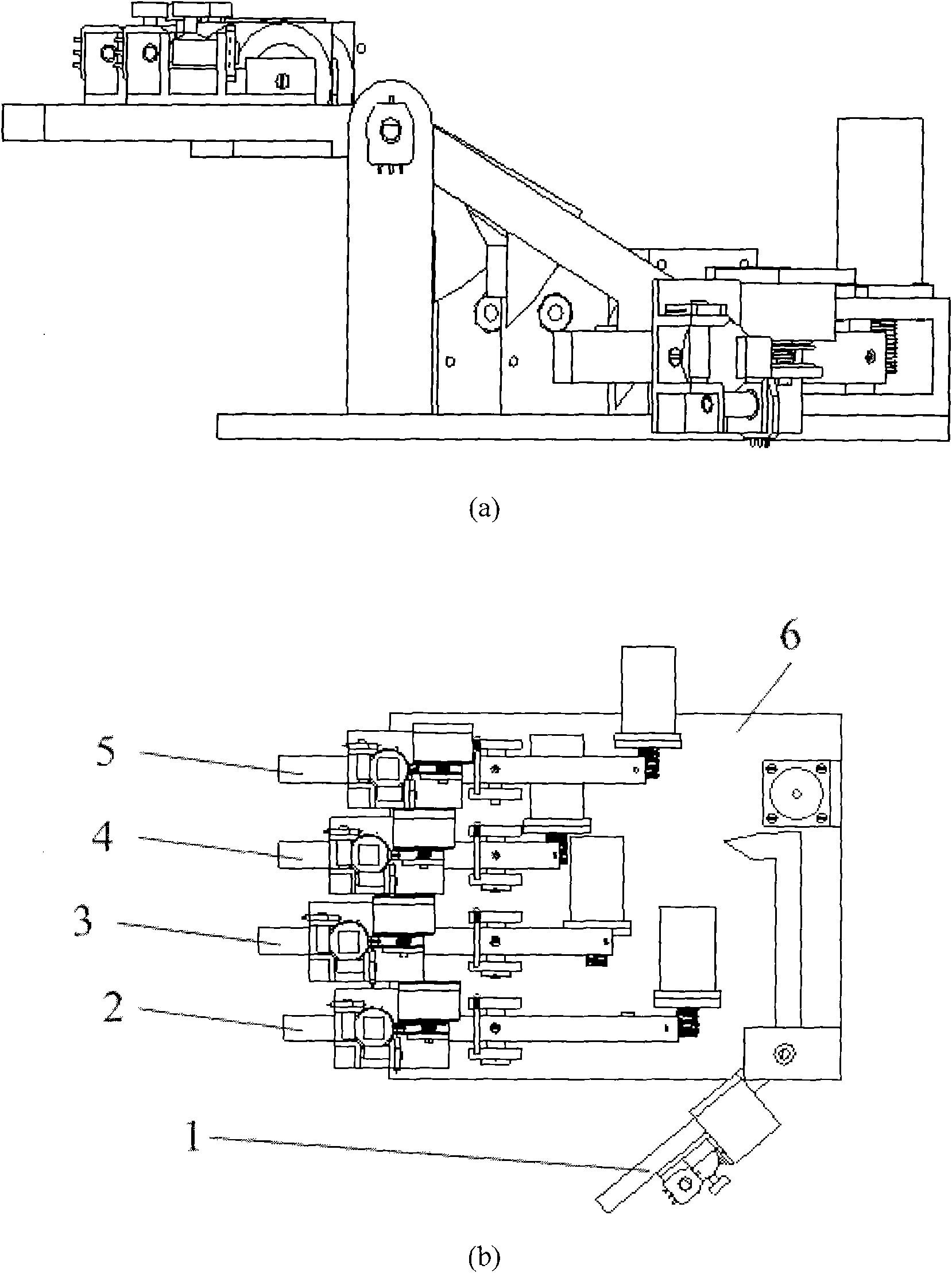
[0031] A desktop-based five-finger touch device, such as figure 1 As shown in (a, b), it includes a thumb tactile component 1, an index finger tactile component 2, a middle finger tactile component 3, a ring finger tactile component 4, a little finger tactile component 5 and a base plate 6. The index finger tactile assembly 2 , middle finger tactile assembly 3 , ring finger tactile assembly 4 , and little finger tactile assembly 5 are respectively vertically fixed on the base plate 6 , and the thumb tactile assembly 1 is horizontally fixed on the base 6 .
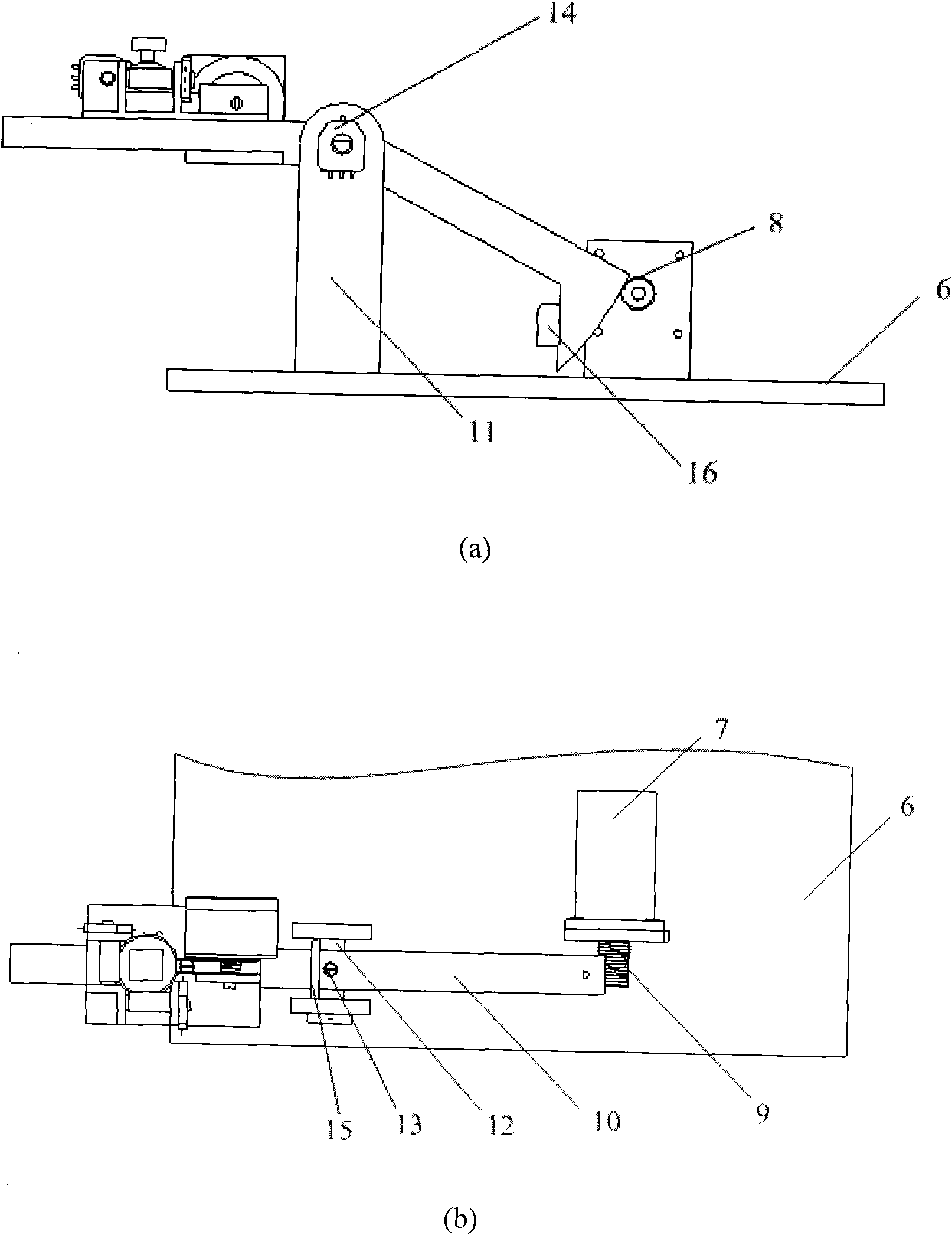
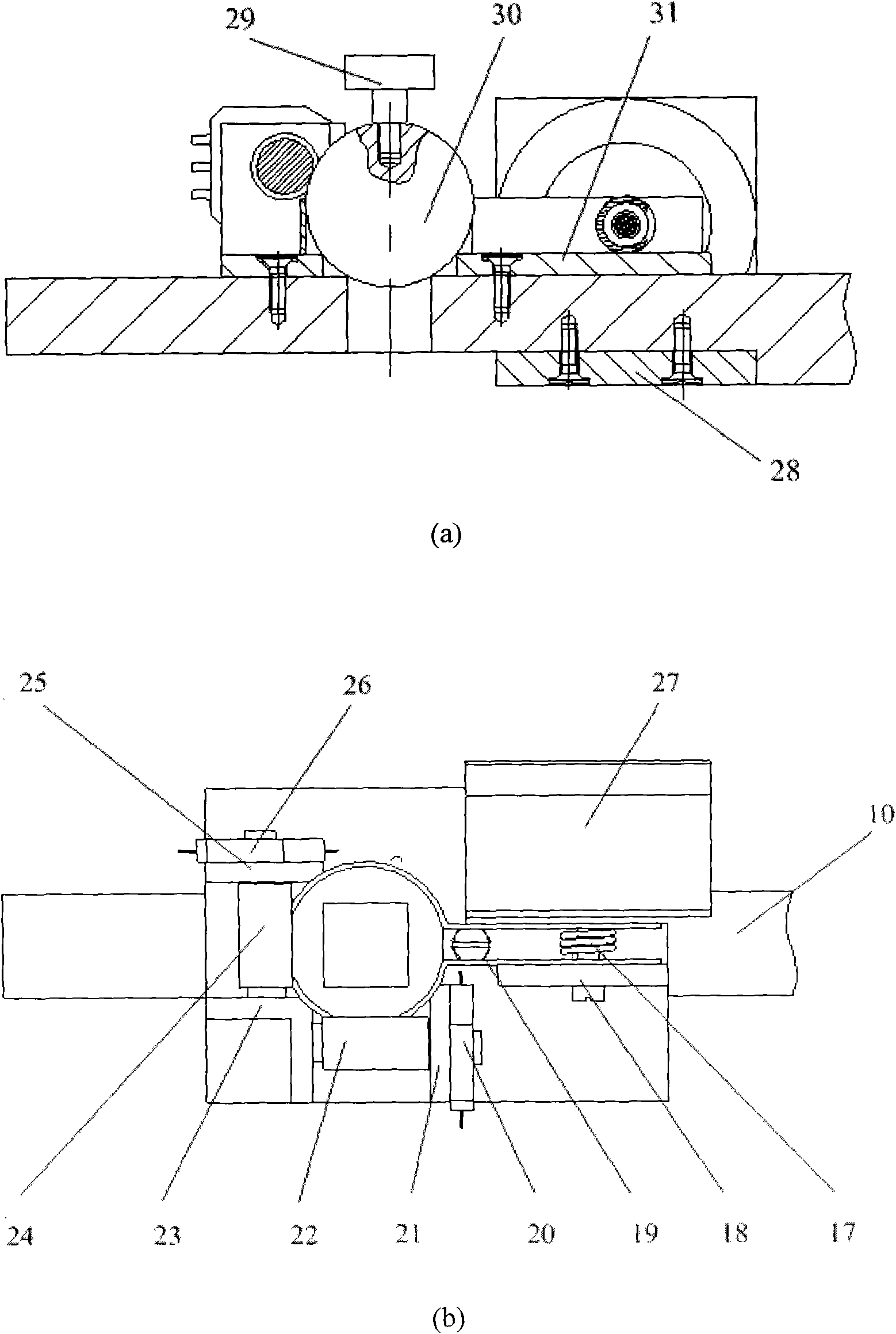
[0032] It is characterized in that the structures and functions of the five finger touch components are the same, such as figure 2 (a, b) shown. Each haptic component can provide a joint bending angle measurement mechanism for a virtual finger; the front end of each haptic component is equipped with a force feedback mechanism ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More