

Task allocation method of heterogeneous multi-robot system
A multi-robot and task distribution technology, applied in the direction of program control, manipulators, manufacturing tools, etc. in the sequence/logic controller, to achieve the effect of ensuring continuity, improving average efficiency, and achieving a large degree of completion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
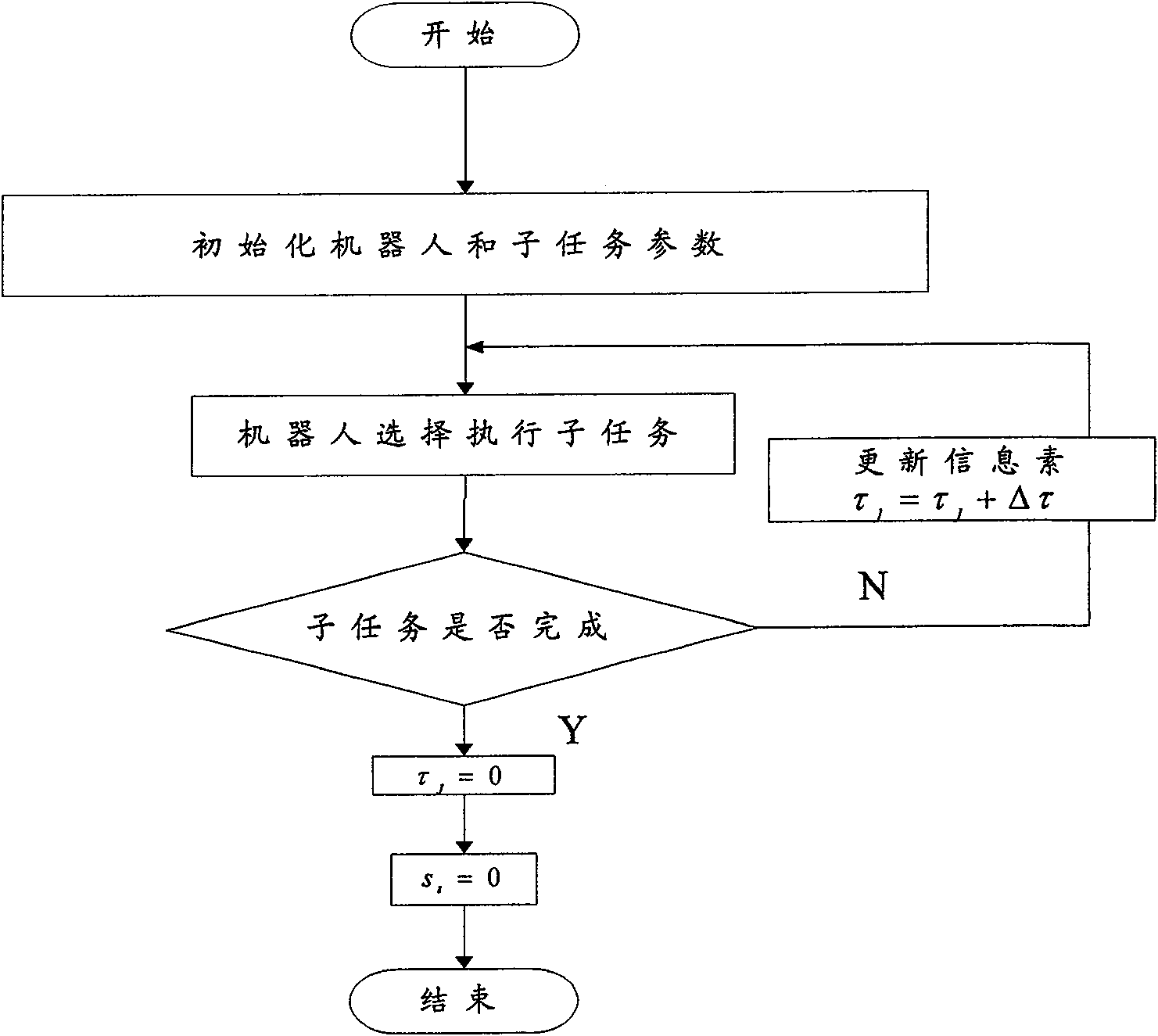
[0031] Preferred embodiments of the present invention will be described in detail below.
[0032] First, explain the following parameters:
[0033] τ j : pheromone on subtask j;
[0034] n ij =1 / d ij : the reciprocal of the distance between robot i and subtask j;
[0035] C i : Robot capability configuration vector, which refers to the functions of robot i itself;
[0036] m j : The capability requirement vector of the subtask, which refers to the functions required to execute the subtask j;
[0037] K ij : Ability matching parameter, indicating whether robot i is suitable for performing a certain subtask j;
[0038] L ij : Robot i’s performance level parameter for subtask j;
[0039] p ij : robot i’s selection probability variable for subtask j;
[0040] A j : the number of robots currently executing subtask j;
[0041] N j : The upper limit of the number of robots required for subtask j;
[0042] T j : the total amount of subtask j, which is a constant;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More