

Front wheel and rear wheel drive steering control system of automobile
A technology of active steering and rear wheel steering, applied in automatic steering control components, steering mechanisms, steering rods, etc., can solve the problem of inability to control the yaw rate and the center of mass side slip angle at the same time, and achieve improved lateral dynamic performance, Improved driving characteristics and enhanced handling stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
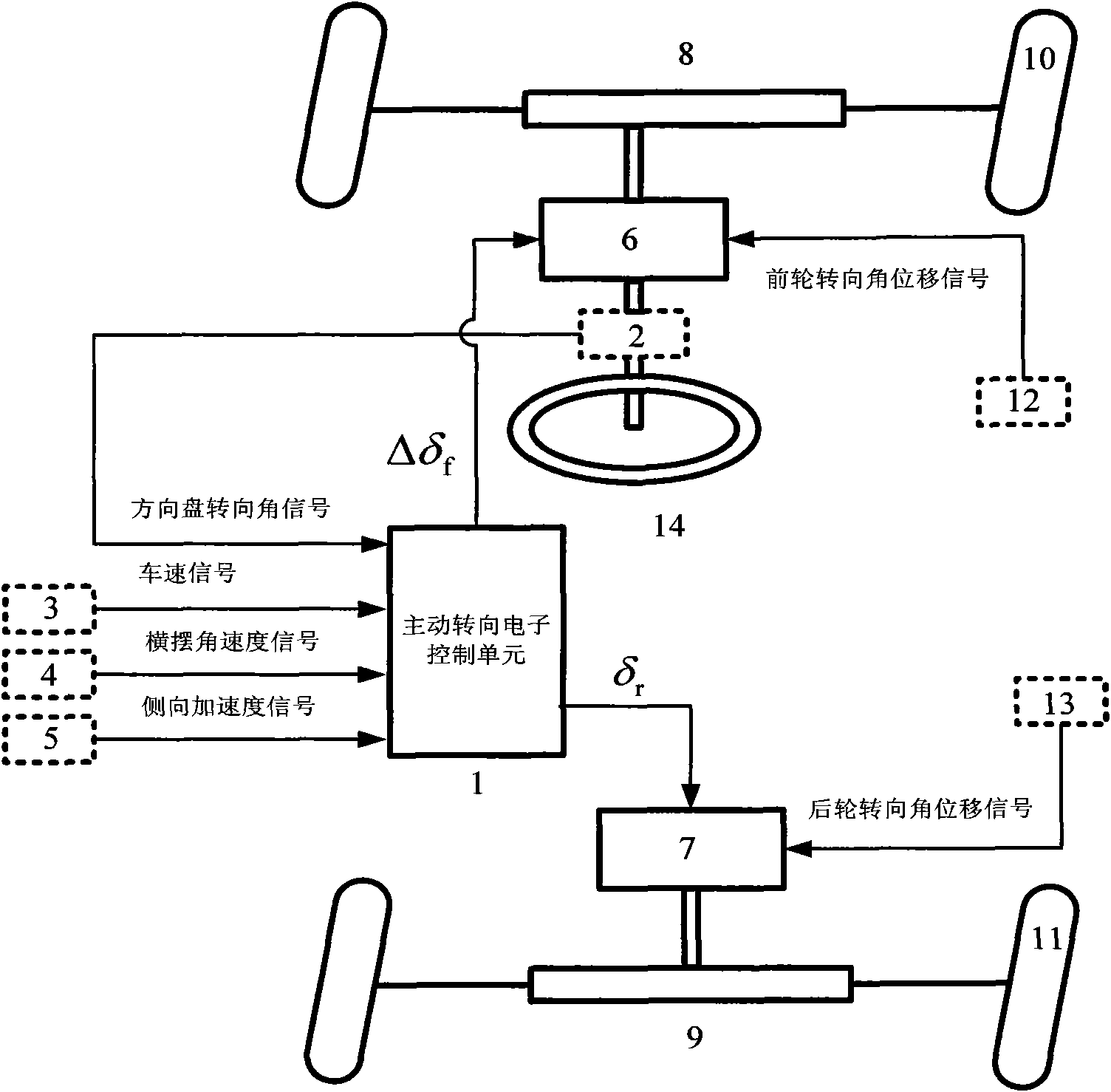
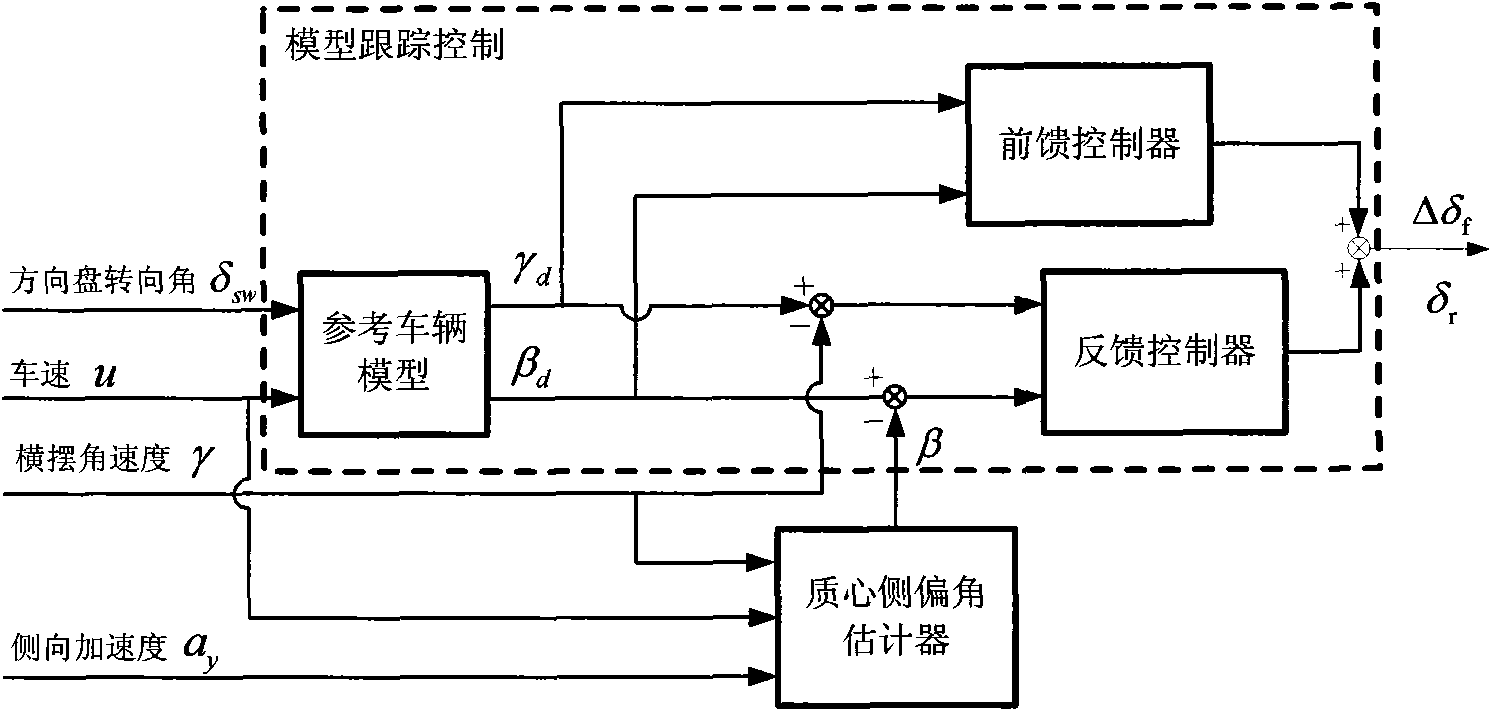
[0018] Such as figure 1 As shown, this embodiment includes: active steering electronic control unit 1, steering wheel steering angle sensor 2, vehicle speed sensor 3, yaw rate sensor 4, lateral acceleration sensor 5, front wheel steering motor servo control unit 6, rear wheel steering motor Servo control unit 7, steering wheel 14. The active steering electronic control unit is provided with a model tracking control module, and the model tracking control module adopts a feedforward control + feedback control structure. Active steering electronic control unit 1 is con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More