

Visual detection method of road driving line
A technology of visual detection and driving line, which is applied in the field of visual detection of road driving line, can solve the problem that positioning accuracy and high real-time performance cannot be taken into account at the same time, and achieve the effect of adaptability, accurate positioning and high real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
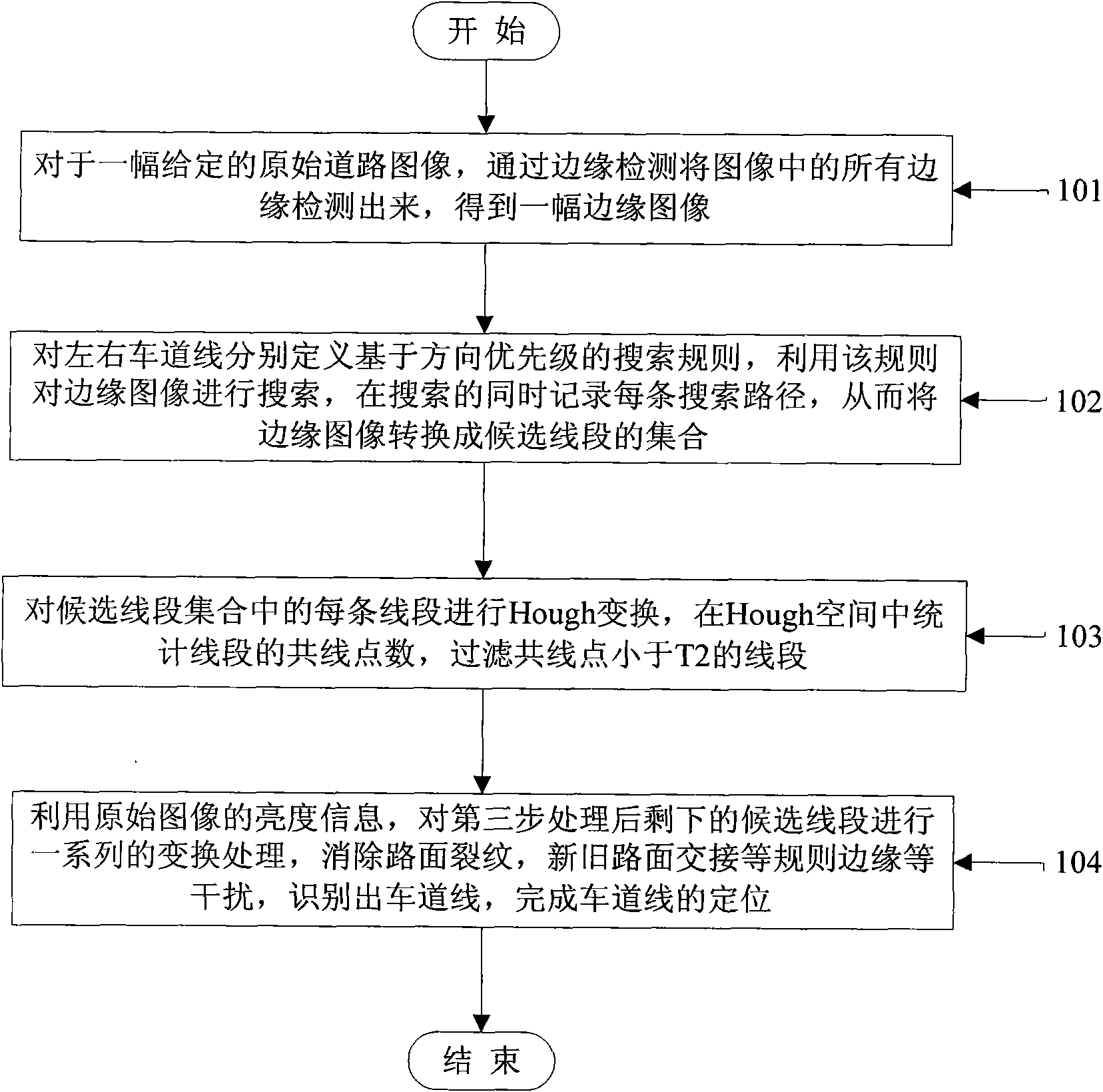
[0034] The implementation of the invention will be further described below in conjunction with the accompanying drawings. figure 1 It is a flow chart of the method of the present invention, such as figure 1 As shown, the method includes the following four steps.
[0035] Step 101: For a given road image, firstly use the method of edge detection to detect all the edges in the image as completely as possible to obtain an edge image. Specifically:
[0036] (1) Smooth image
[0037] Use a two-dimensional Gaussian function to smooth and denoise the original image f(x, y) to obtain a smooth image I(x, y). Let the two-dimensional Gaussian function be
[0038] G ( x , y ) = 1 2 π σ 2 exp ( - x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More