

Isomorphism identification method of mechanism kinematics chain based on pseudo-hybridization hybrid genetic algorithm
A hybrid genetic algorithm and mechanism kinematic chain technology, applied in computing, genetic models, special data processing applications, etc., can solve problems such as low efficiency of mechanism isomorphism recognition, achieve easy coding, best effect, and overcome failure effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
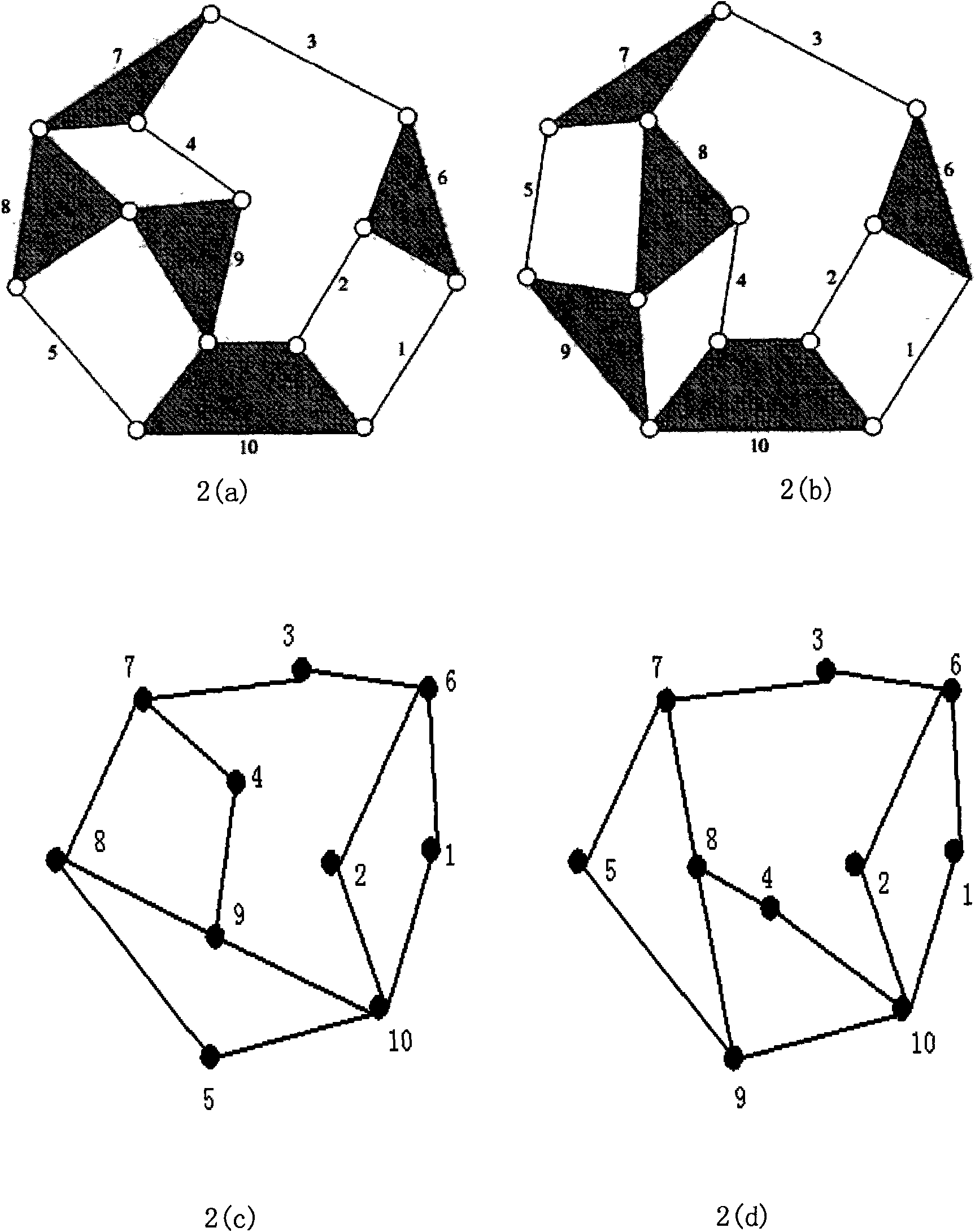
[0080] Such as figure 2 (a) and 2(b) show two 10-bar kinematic chains, and the corresponding topological diagrams of the two kinematic chains are as follows figure 2 (c), 2(d) shown.
[0081] Parameter setting: population size M=50; hybridization probability P c =0.8; mutation probability P m =0.6
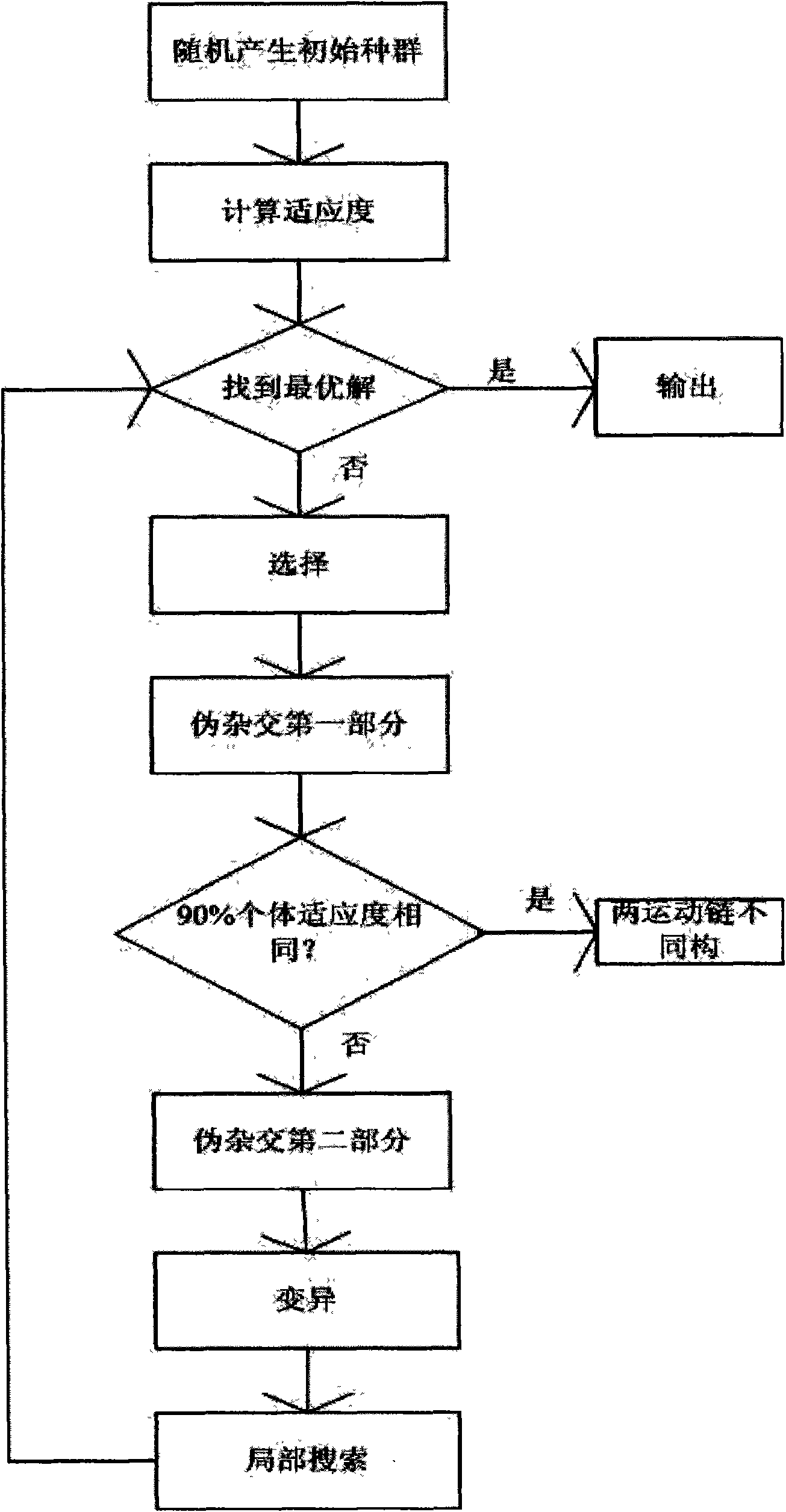
[0082] according to figure 1 The program flow of the program is iterated, and the result of the isomorphism of the two kinematic chains can be obtained in a very short time. In order to prove the high efficiency of the algorithm of the present invention, repeat the independent operation 1000 times to this embodiment, and statistical performance index, as shown in table 1 below:
[0083] Table 1
[0084]
[0085] The implementation results in Table 1 prove that the pseudo-hybrid genetic operator overcomes the defects of the simple genetic algorithm, and the combination of the genetic algorithm and the local search algorithm greatly reduces redundant calculations and impro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More