

Visual locating and navigating method based on single signpost
A technology of positioning method and navigation method, which is applied in surveying and mapping and navigation, navigation, photogrammetry/video measurement, etc., can solve the problems such as difficult path change, insufficient real-time performance, poor anti-interference ability, etc., and achieve simple algorithm, Improve real-time performance and reliability, and avoid matching errors
Inactive Publication Date: 2010-03-03
TIANJIN UNIVERSITY OF TECHNOLOGY
View PDF0 Cites 25 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0006] The purpose of the present invention is to solve the problems of the existing robot positioning and navigation methods such as insufficient real-time performance, poor anti-interference ability, small amount of road sign information
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
 Login to View More
Login to View More PUM
 Login to View More
Login to View More Abstract
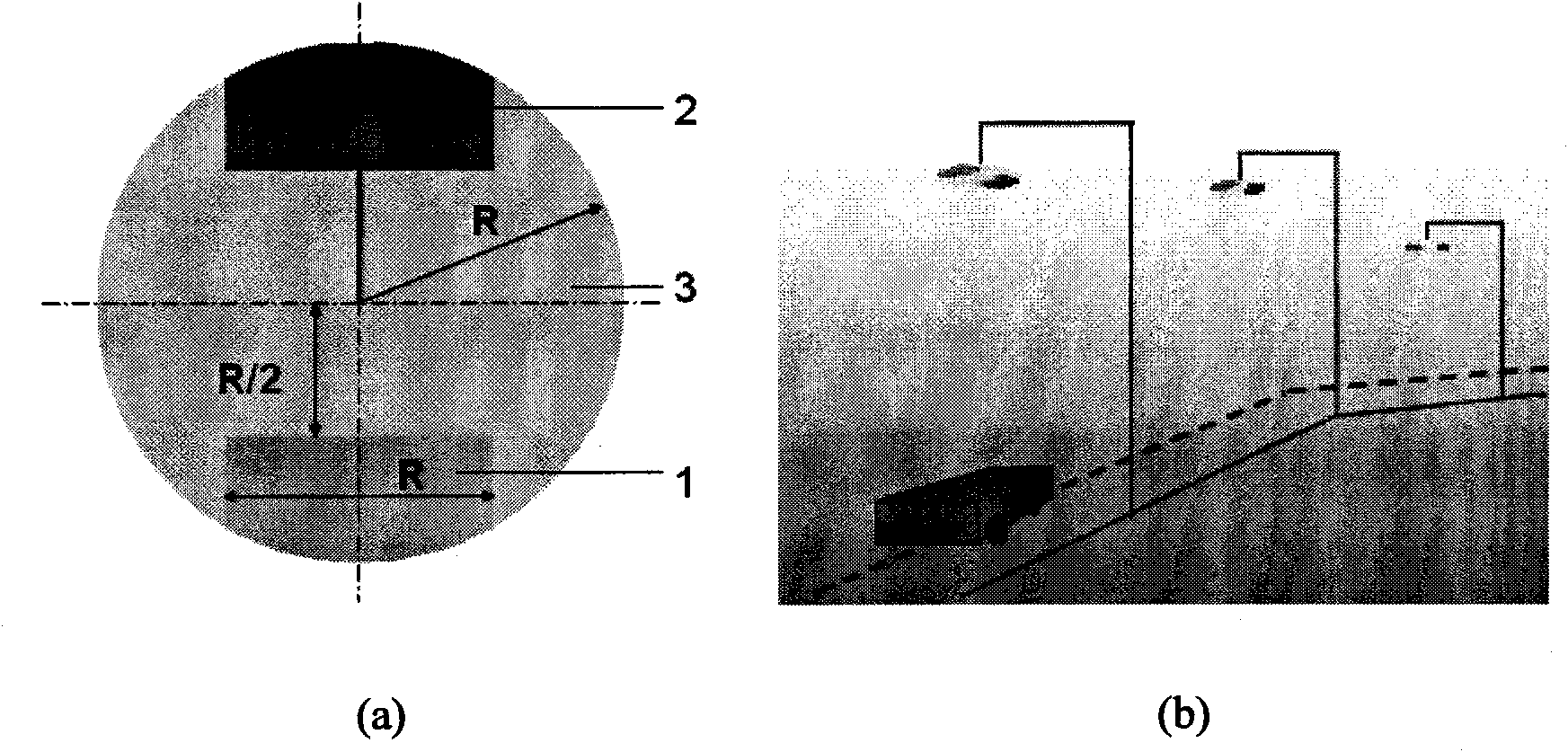
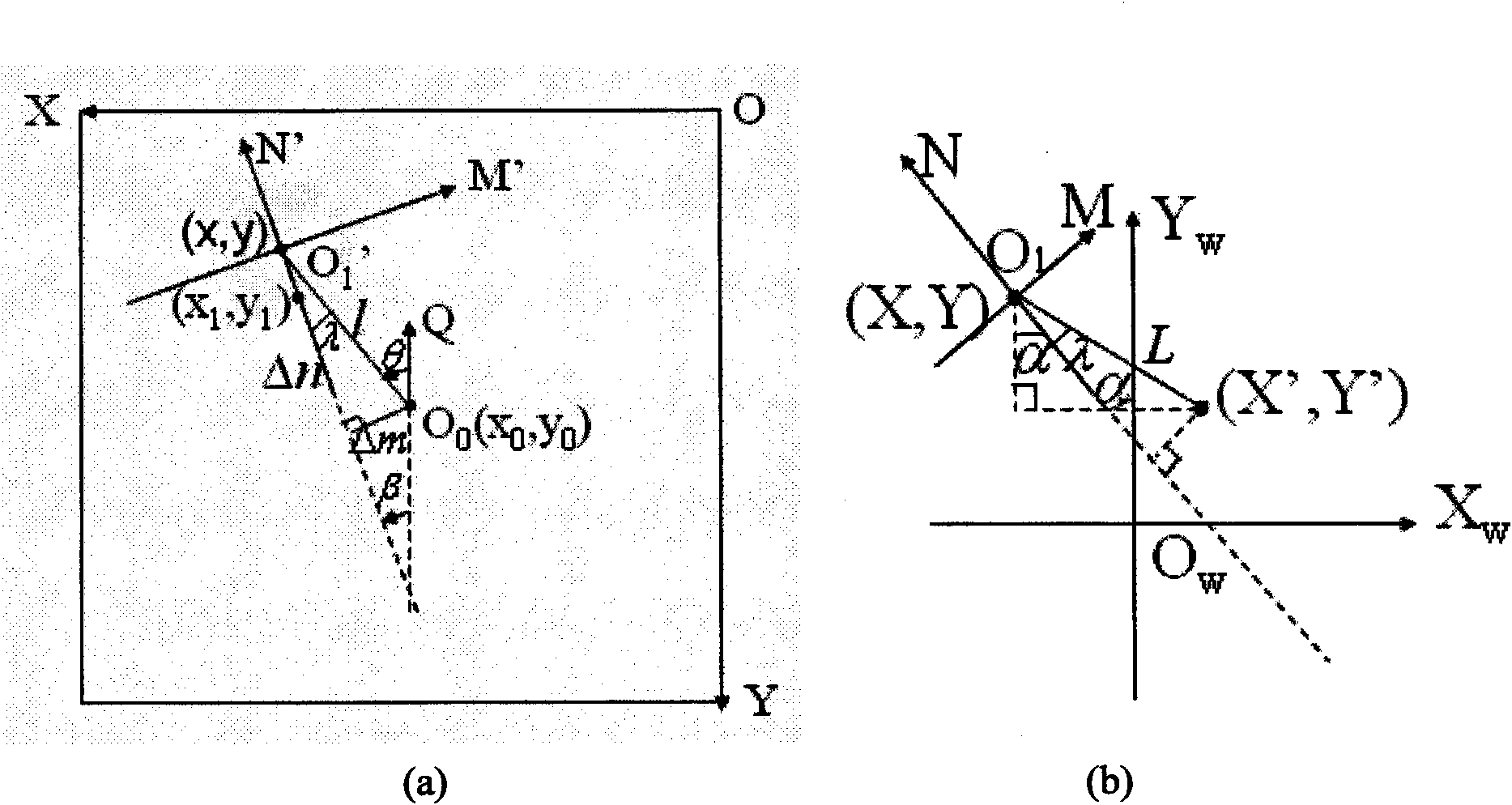
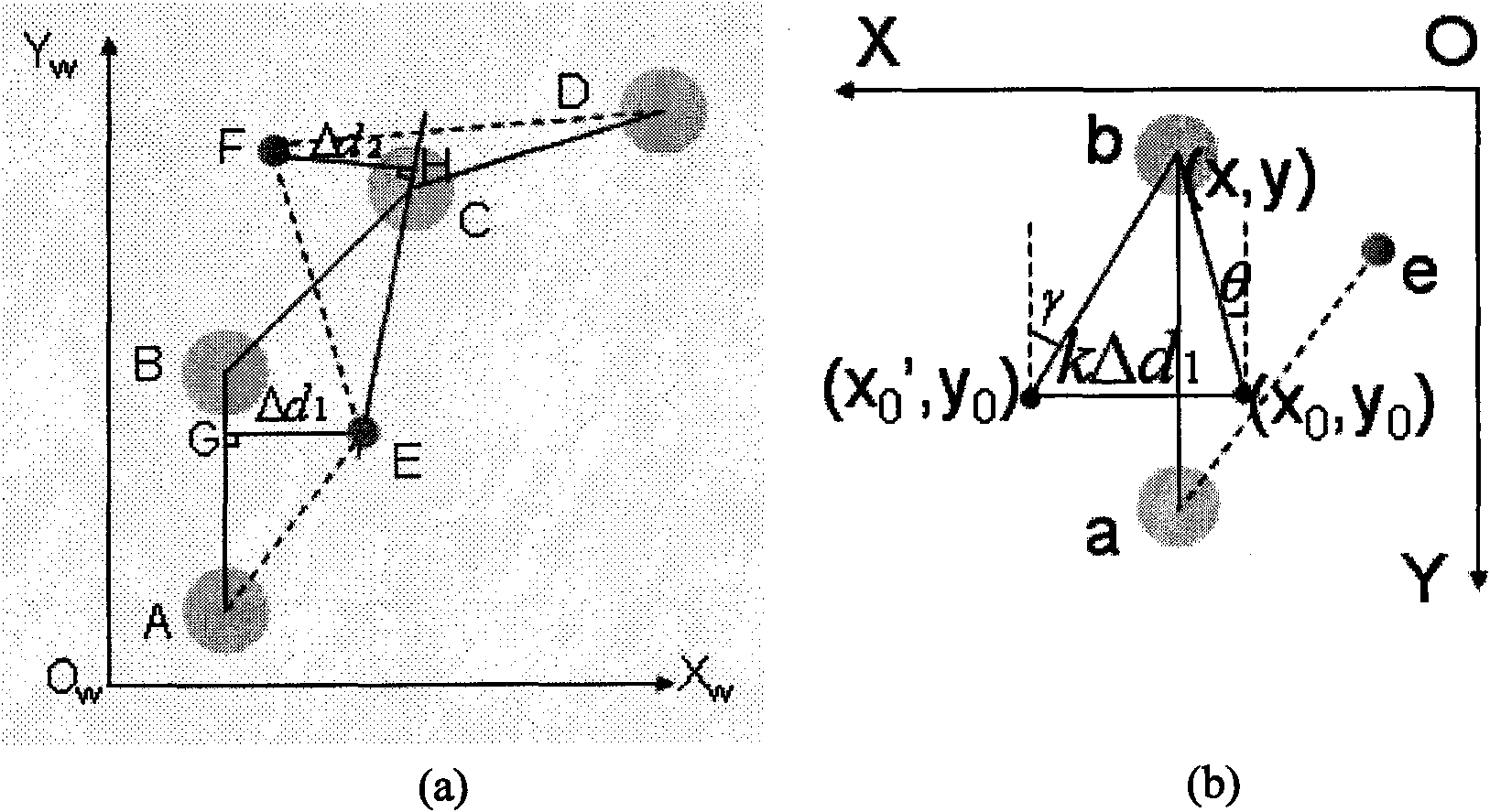
A visual locating and navigating method based on single signpost solves the problems that the existing locating and navigating method has low real-time performance and bad anti-interference capability, is not easy to change the path, and the like. In the invention, the signpost comprises a disc-type signpost mainbody, a first auxiliary part used for locating a robot and a second auxiliary part used for indicating the direction of the next signpost. The method can realize the location and navigation of the robot only by utilizing the single signpost to and comprises the following steps of: paving the signposts above the robot at interval, acquiring scene images by a lens and carrying out recognition and location to the signpost, the first auxiliary part and the second auxiliary part; and subsequently utilizing the relationship among the image coordinate system, the signpost coordinate system and the world coordinate system to locate and navigate the robot. The locating and navigating algorithm based on the signpost effectively shortens the processing regions, has good real-time performance and strong anti-interference capability and can program to set the path.
Description
【Technical field】: [0001] The invention belongs to the technical field of robot vision positioning and navigation. 【Background technique】: [0002] During the working process of a robot, it is often necessary to determine its own position (positioning) and navigate, so positioning and navigation has always been an important research direction in the field of robotics, and has a good application prospect. [0003] Commonly used positioning methods are to use ultrasonic or infrared sensors to sense the relative position of the robot and surrounding objects, thereby positioning the robot. This method can accurately determine the relative position of the robot and surrounding objects, but if you want to absolutely Positioning is difficult, so it is mainly used for navigation. Another method is to use vision to obtain environmental information and match the data in the database to locate the robot. This method can obtain the absolute position of the robot more accurately, but th...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01C11/00G01C21/00
Inventor贾云伟王聃曹作良
OwnerTIANJIN UNIVERSITY OF TECHNOLOGY