

Method for identifying surface electromyography (sEMG) on basis of empirical mode decomposition (EMD) sample entropy
A technology of myoelectric signal and recognition method, applied in the field of pattern recognition, which can solve the problems of real-time control of myoelectric prosthetic hand and weak anti-noise ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operating procedures.
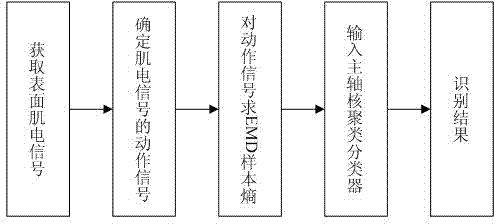
[0057] Such as figure 1 As shown, this embodiment includes the following steps:
[0058] The first step is to obtain the sample data of the human upper limb EMG signal, specifically: firstly, the human upper limb EMG signal is picked up by the EMG signal acquisition instrument, and then the energy threshold is used to determine the action signal of the EMG signal.
[0059] (1) Collect the EMG signals of the upper limbs of the human body. The subjects performed 80 groups of 4 kinds of forearm movements, wrist up, wrist down, fist stretching and fist clenching, with a total of 320 sets of data. The extensor carpi ulnaris and flexor carpi ulnaris of the upper limbs were selec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More