

Whisker sensor suitable for inclined angle between robot perception and barrier
A sensor and obstacle technology, applied in the direction of instruments, optical devices, measuring devices, etc., can solve the problems of difficult signal acquisition and analysis, small tentacles, and a lot of time, so as to increase the amount of light spot movement, The effect of simplifying the processing process and saving production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below in conjunction with the accompanying drawings.
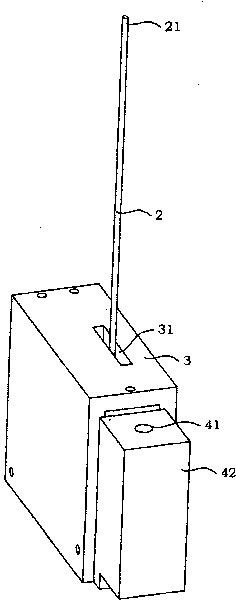
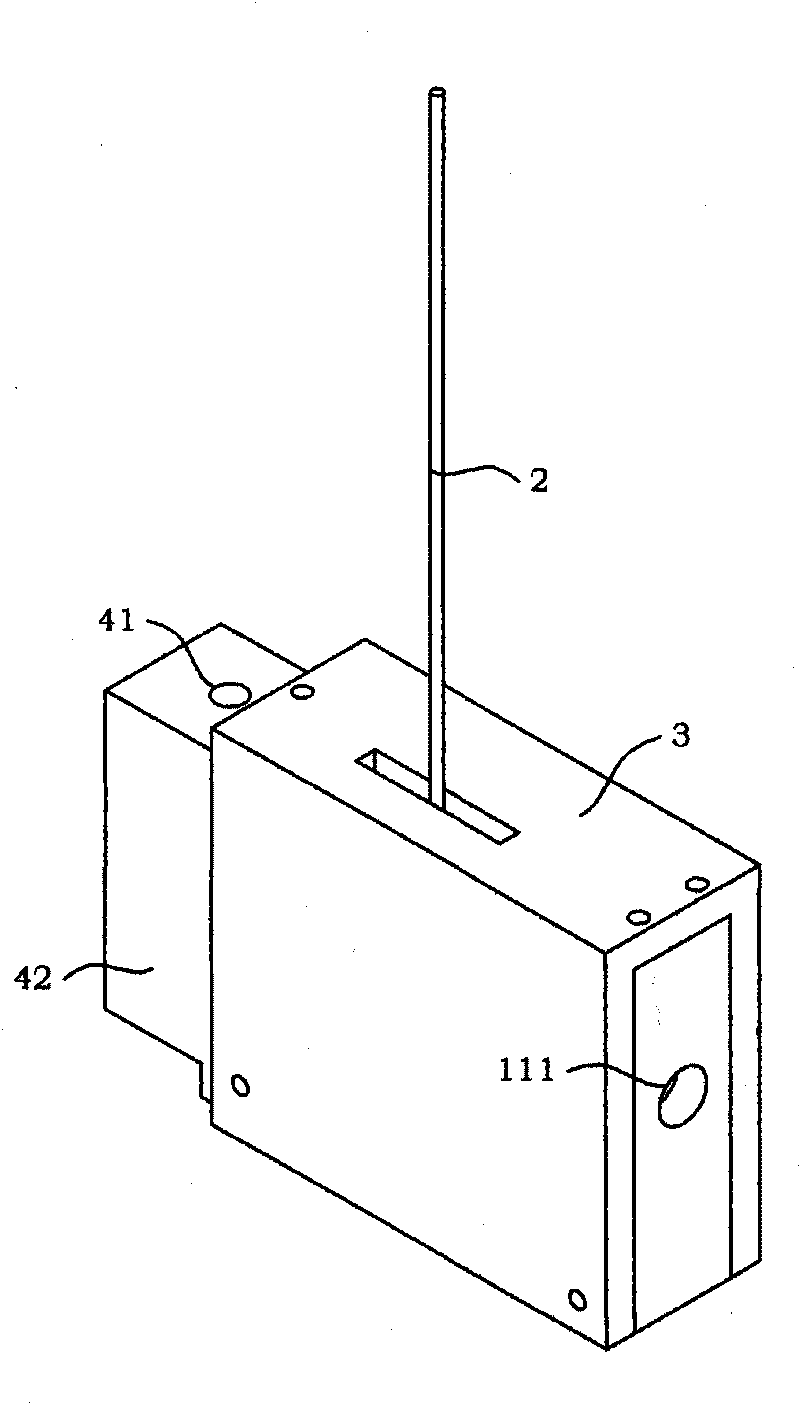
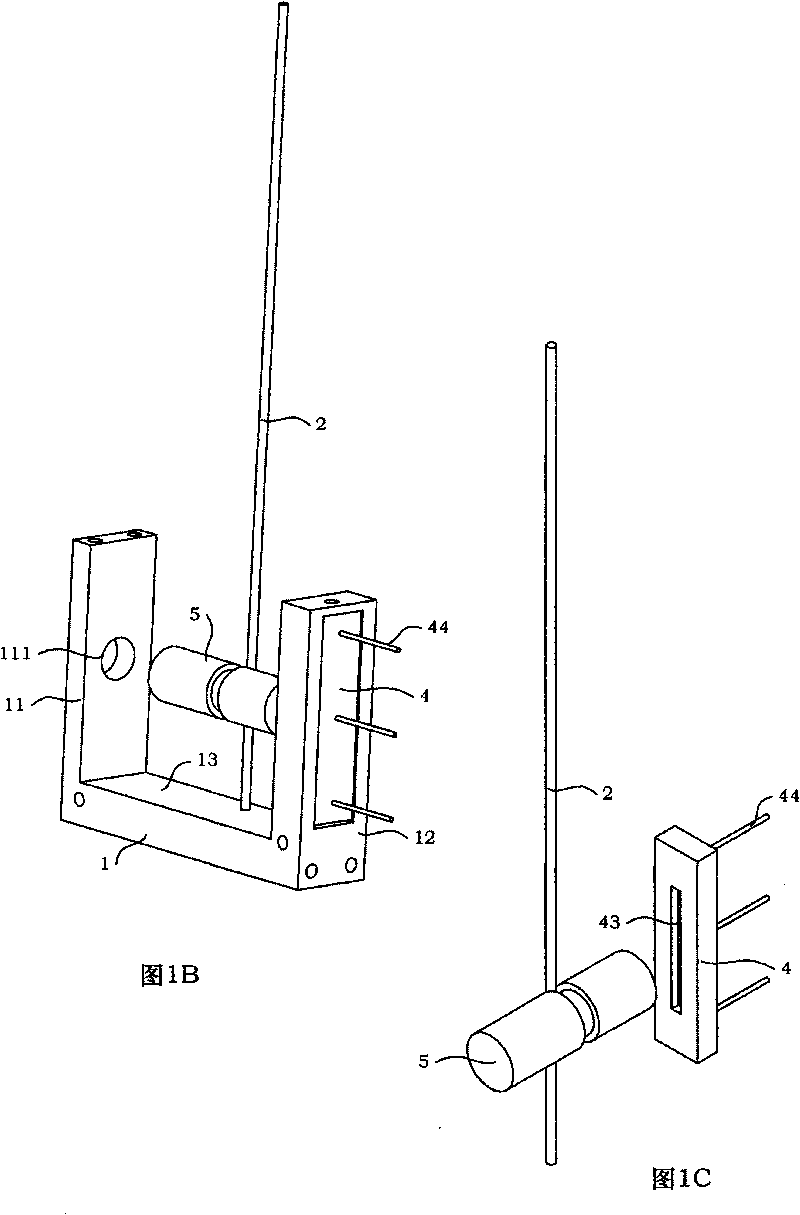
[0039] see figure 1 , Figure 1A , Figure 1B , Figure 1C and Figure 1D As shown, the present invention is a whisker sensor suitable for sensing the angle between a robot and an obstacle. The whisker sensor includes a laser 5 , a one-dimensional PSD sensor 4 , a whisker 2 , a base 1 and a cover 3 . The whisker sensor of the present invention belongs to the detection device part of the robot, and the whisker sensor is installed on the robot body 6, and the best position is to be installed on the front end (head) of the robot body 6.
[0040] (1) Laser 5
[0041] see Figure 1B , Figure 1C and Figure 1D As shown, the laser 5 is mounted on the whisker 2 and placed in the housing 3 .
[0042]The laser beam emitted by the laser 5 is directly irradiated on the one-dimensional PSD sensor 4 , and when the tentacles 2 move, the laser 5 is directly driven ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More