

Flexible calibrating method and device for variable-format multiple-camera system
The technology of a calibration device and calibration method, which is applied in image data processing, television, instruments, etc., can solve the problems of difficulty in guaranteeing calibration accuracy, difficulty in application, complicated calibration process, etc., and achieve the effect of reducing the difficulty of manufacturing and improving the accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
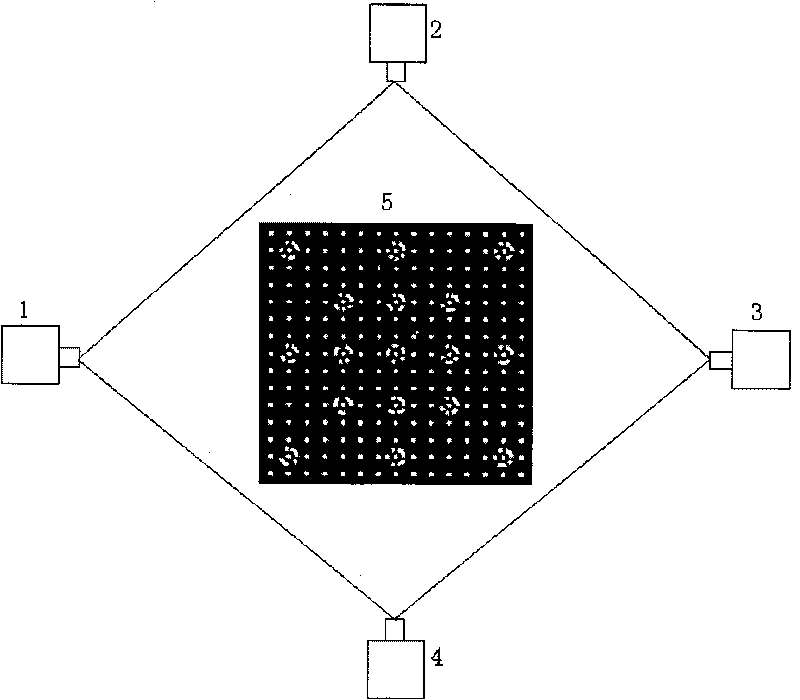
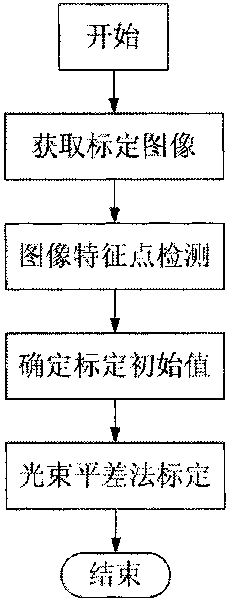
[0035] The present invention proposes a fast camera calibration method for a multi-vision system, the calibration device such as figure 1 As shown, 1, 2, 3, and 4 in the figure represent the cameras that make up the multi-camera system, and 5 represents the calibration template. The basic process is as follows figure 2 shown. In addition, the present invention independently develops matching calibration software based on the Visual C++6.0 platform.
[0036] A method for calibrating a variable-format multi-camera system proposed by the present invention is described as follows by taking the calibration of a multi-camera system with a field of view of 400mm*400mm*400mm as an example:
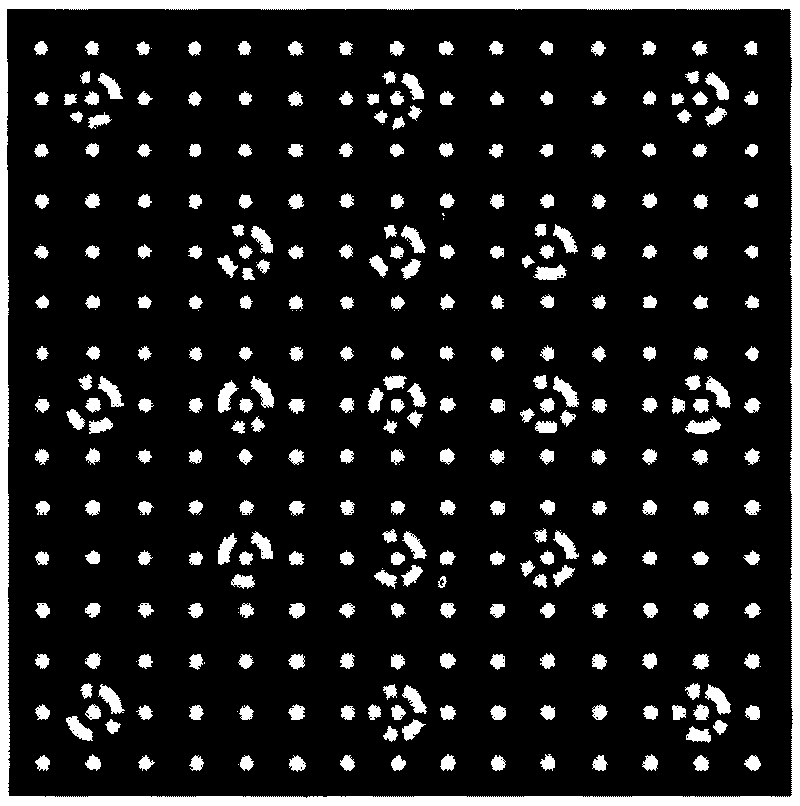
[0037] The first step is to obtain the calibration image: using such as figure 2 The calibration template with a format size of 400mm*400mm is shown. There a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More