

Observation condition number-based method for selecting autonomously located road sign of deep space probe
A deep space detector and autonomous positioning technology, applied in the direction of integrated navigator, etc., can solve the problem that the deep space detector does not have the method of selecting the positioning road sign independently.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to better illustrate the purpose and advantages of the present invention, the present invention will be further described below by taking a deep-space probe for autonomous navigation using road signs as an example, with reference to the accompanying drawings and specific implementation methods.
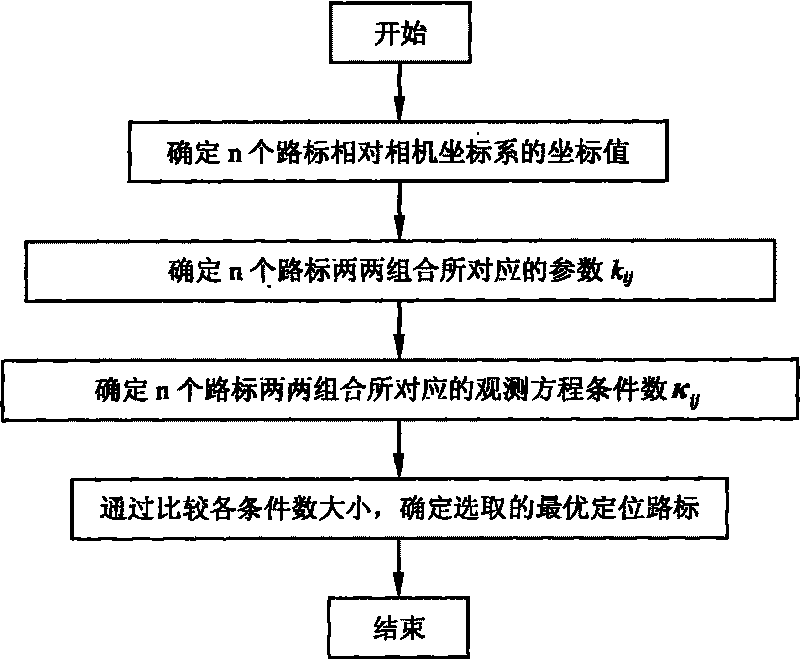
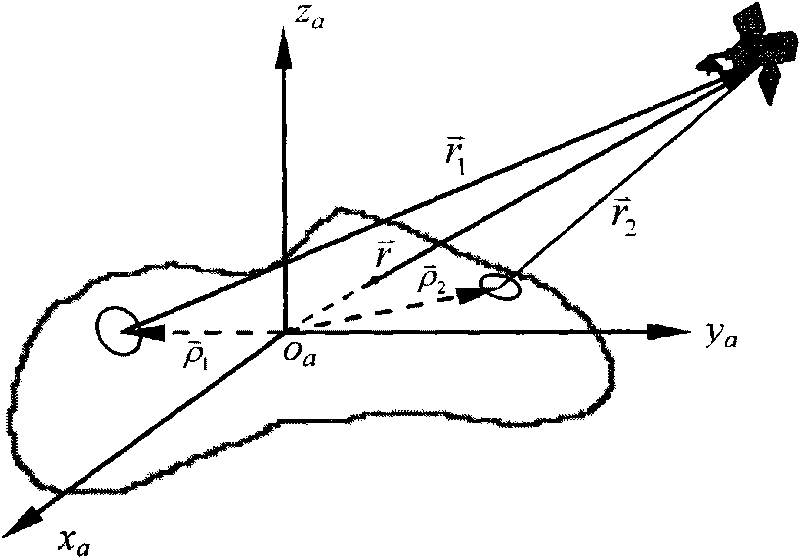
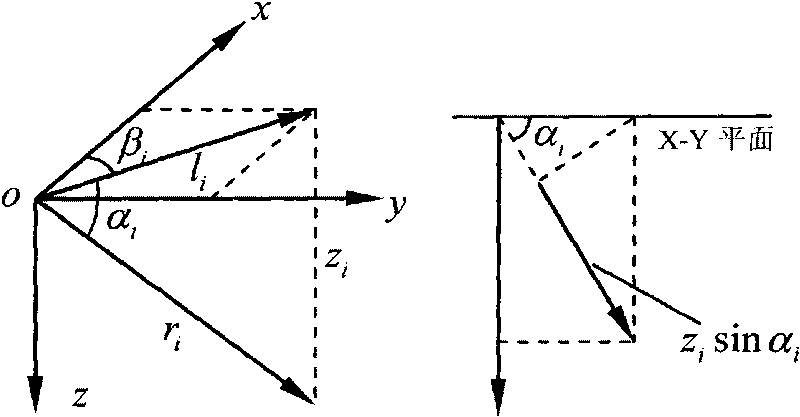
[0034]When the deep space probe is near the target celestial body, it uses an optical camera to take images of the surface of the target celestial body, extracts landmarks with obvious terrain features such as rocks and craters, and uses them as reference points for the autonomous navigation of the deep space probe. In the case that the attitude of the deep-space probe relative to the target celestial body is known, the position of the deep-space probe relative to the target celestial body can be determined by using the information of two landmark points. Airborne calculation time, two navigation landmarks are used in the navigation algorithm to carry out the autonomous...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More