

Obstacle avoidance aiding method based on teleoperation mobile robot
A mobile robot, teleoperation technology, applied in the direction of instruments, non-electric variable control, position/direction control, etc., can solve the problems of wasting operator energy, surrounded by obstacles, unable to distinguish obstacles, etc., to overcome work difficulties , the effect of reducing workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Hereinafter, taking a group of ranging sensors and two cameras as an example, the method for assisting obstacle avoidance based on a teleoperated mobile robot of the present invention will be described in detail in conjunction with the drawings and specific embodiments.
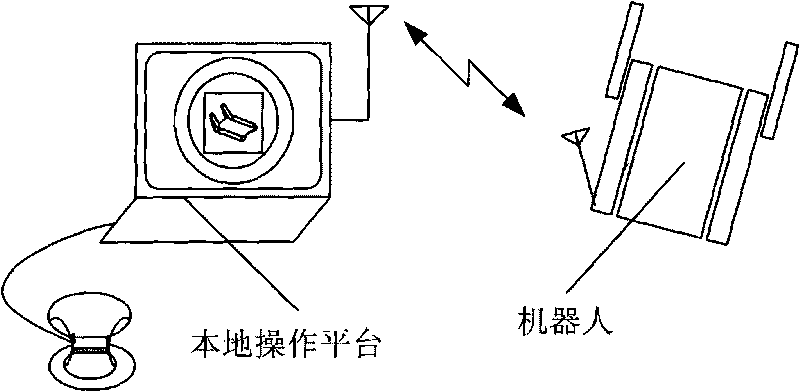
[0019] Such as figure 1 As shown, it is a schematic diagram of wireless communication between the local operating platform and the teleoperated mobile robot of the present invention.
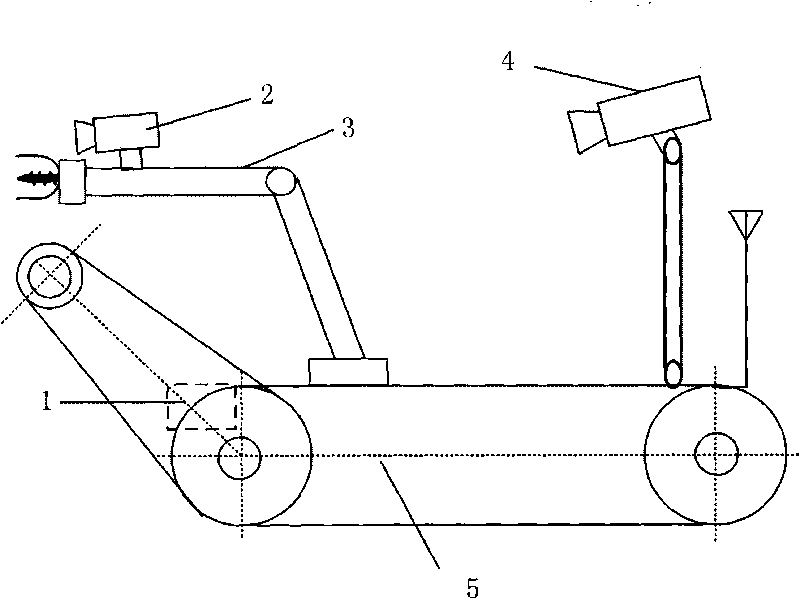
[0020] Such as figure 2 As shown, the auxiliary obstacle avoidance method based on the teleoperation mobile robot includes a teleoperation mobile robot car body 5, a ranging sensor group 1 installed on the front end of the teleoperation mobile robot car body, a first camera 4 on the rear bracket, a mechanical Arm 3, the second camera 2 installed above the mechanical arm.
[0021] The functions of each part are described as follows:
[0022] (1) Teleoperation mobile robot car body 5: a mobile robot based on teleoperat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More